问:DeepSeek-R1 是否可以蒸馏成自动驾驶车端小模型,部署车端实现智能驾驶?
答:将DeepSeek-R1这类大模型通过知识蒸馏技术压缩为适合车端部署的小模型,从技术原理上是可行的,但实际落地需要综合考虑以下关键问题:
一、技术可行性分析
1. **模型适配性**
- 若DeepSeek-R1具备多模态感知能力(如视觉理解、传感器融合),其知识可迁移至自动驾驶的感知模块
- 时序决策能力可适配行为预测/路径规划模块
- 需针对性设计蒸馏任务(如BEV特征生成、场景理解)
2. **蒸馏技术路径**
- **跨模态蒸馏**:将语言-视觉关联知识迁移至纯视觉模型
- **特征蒸馏**:保留关键场景理解特征(如危险目标识别)
- **混合蒸馏**:结合logits蒸馏与中间层特征匹配
3. **效率优化**
- 需配合量化(INT8/TF32)与稀疏化技术
- 架构搜索(NAS)优化计算图
- 内存访问模式适配车规级芯片特性
二、车端部署挑战
1. **实时性约束**
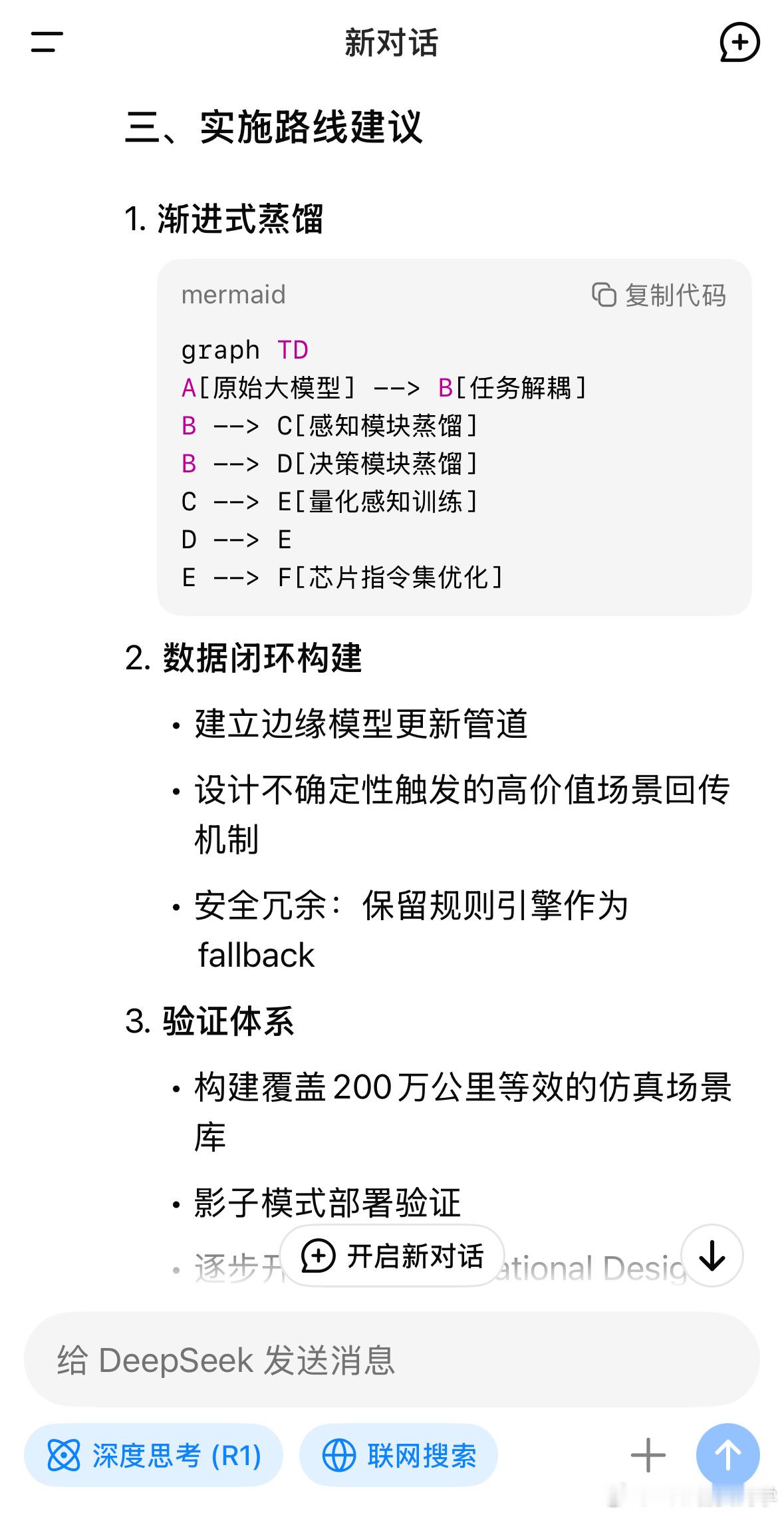
- 需满足 B[任务解耦]
B --> C[感知模块蒸馏]
B --> D[决策模块蒸馏]
C --> E[量化感知训练]
D --> E
E --> F[芯片指令集优化]
```
2. **数据闭环构建**
- 建立边缘模型更新管道
- 设计不确定性触发的高价值场景回传机制
- 安全冗余:保留规则引擎作为fallback
3. **验证体系**
- 构建覆盖200万公里等效的仿真场景库
- 影子模式部署验证
- 逐步开放ODD(Operational Design Domain)
四、风险与对策
1. **知识残留风险**
- 采用渐进冻结策略
- 设计蒸馏损失函数时增加安全约束项
2. **长尾场景覆盖**
- 集成主动学习机制
- 建立基于场景熵的样本筛选
3. **实时性劣化**
- 时间敏感型模型架构设计
- 混合精度流水线计算
当前行业实践表明,通过分层蒸馏(如先将大模型蒸馏为中等规模教师模型,再二次蒸馏为车端模型),结合车规级模型编译器(如特斯拉的HydraNet技术栈),可达到约5.6TOPS算力需求下实现L2++级功能。但需注意,完全端到端方案仍需谨慎验证,建议从感知模块先行突破,逐步向决策控制延伸。