有一个关于智驾的经典问题。
就是在倒车入库的时候,无论遇到什么障碍物,哪怕是个纸箱,或者一辆手推车,哪怕是伸出来的树枝,系统都能识别并报警,可以说没什么不能识别出来,没有什么异形障碍物不能报警的。
而这个功能基本所有带倒车雷达的车辆都带有,在几十年前都能实现的功能了。但现在的汽车,为什么在马路上跑,智驾还有白名单现象,异形障碍物是这也识别不了,那也识别不了。面对各种马路上不常见的异形障碍物,不报警也不刹车,就这么直接撞上去的事故大把抓。
实际这个就是和超声波雷达的特性有关了。
超声波雷达(俗称倒车雷达)是通过发射并接受超声波(机械波),根据时间差算出障碍物距离,短距离测距精度达到1-3CM。
超声波雷达一般有UPA和APA,APA和UPA的工作频率不同,不形成彼此干扰。
UPA的探测距离一般在15CM-250CM。通常安装在汽车前后保险杠上,用于辅助泊车。
APA的探测距离在30CM-500CM,如果要进行自动泊车,车辆的侧面也会装有超声波的传感器,用于测量侧方障碍物的相对距离,这里一般用的是APA.因为APA的探测距离较远,也可用在驾驶的时候探测后方、侧面是否有来车过于靠近。
一般完善布置的超声波雷达会有12颗,前四后四左二右二,四颗是探测前方和两个偏角,左右各两颗是探测的车侧,这就能够在自动泊车的时候,12颗超声波雷达把车身周围全部都探测到。
但如果有的车只配了4颗超声波雷达,且都放在了后面(很多入门车都是这样),那么智能泊车自然就不可能带,因为侧面和前面没有超声波雷达感知,自然就容易出问题,即便要擦碰到了车头,车侧都不知道。
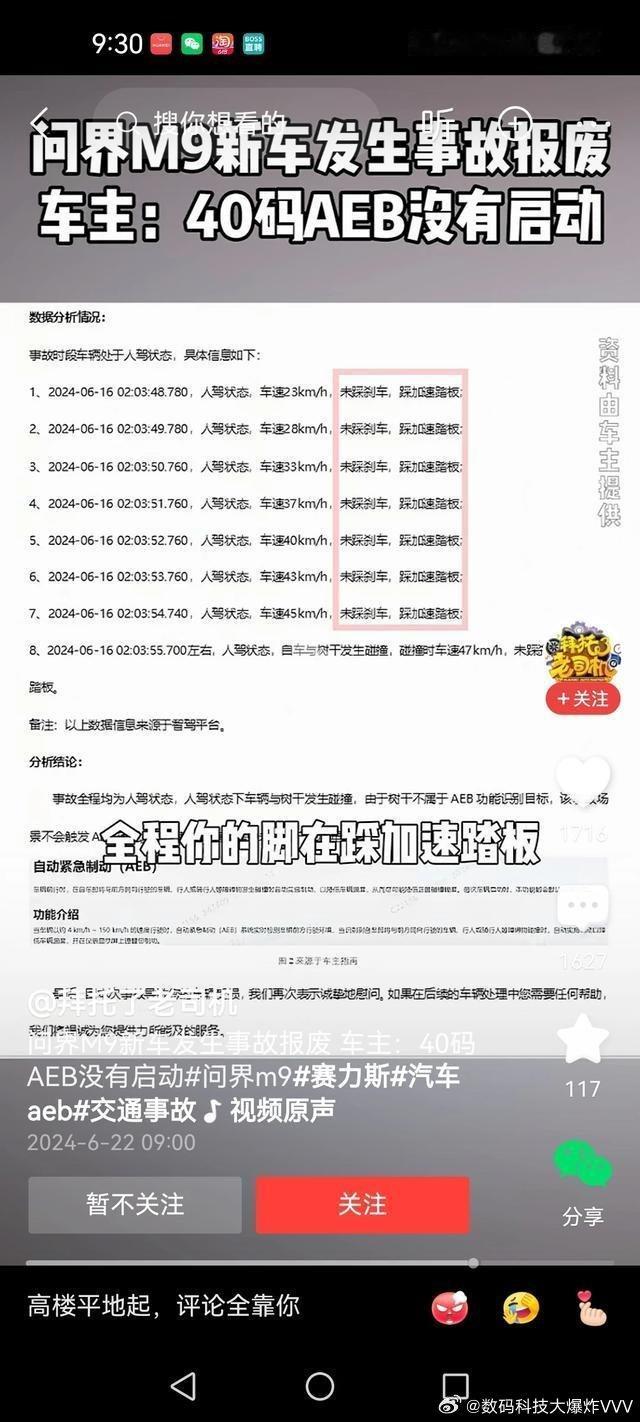
看到这里,可能有人说了,特斯拉是全部用摄像头来进行判断,进行自动泊车的。但摄像头和超声波雷达不一样,摄像头主要是靠环境光,容易受外界干扰,如黑夜,如下雨,下雪,刮风沙都会干扰摄像头,而超声波雷达则不受光学和恶劣天气的影响。
所以,拥有12个超声波雷达的探测,那么在下大雨,下雪,刮风带沙的时候,都能很好完成室外的自动泊车。
但超声波雷达只能探测超短距离,且是声波探测,速度较光线来得慢,所以无法在中高速下起到作用。这也是很多人的疑惑点,为啥我倒车有啥乱七八糟的大小障碍物都能报警甚至刹停。
但是在驾驶途中,这些功能却不起作用,碰到一些识别不了的障碍物说撞就撞。
就是因为超声波雷达的测距实在太短了,根本反应不及,比如30公里/小时行驶,一秒就是8.3米,等3米外声波探测到了障碍物,再反馈到了系统,系统判断后再给出指令,指令传达给刹车,给反应的时间就零点几秒,甚至车速度快一点的,连0.1秒的应急时间都给不到,车在报警之前,该撞就撞了。
所以,对长距离的探测,就用上了毫米波雷达和摄像头。
这个之前聊过,就不多说了。
但是超声波雷达也有其弊端,就是超声波是机械波,受温度影响较大。零摄氏度的波速为332m/s,30摄氏度的波速为350m/s,所以温度过高或者过低,都会造成超声波测距的误差。
依赖自动泊车的朋友们,如果停车的地方温度极端,一定要注意了。
比如武汉夏天的地面辐射温度会超过50摄氏度,或者东北的冬季室外温度零下二三十摄氏度,那么停车的时候就不要太相信屏幕上的标注距离了。
有朋友估计看到这里,会说超声波雷达都有温度补偿的。但是温度探测器的误差还是比较大的,温度过高、过低所导致的误差可能在10CM范围内。
此外,超声波雷达基本是不受灰尘污垢水渍影响,所以不用每次出去就擦拭……
但等同的就是超声波雷达是能够穿透一些密度小的物体,比如薄玻璃等(厚玻璃穿透不了),是无法反射回来告知有障碍物的。所以这种密度很低的物体,超声波雷达是有可能无法识别的。
另外,超声波雷达由于设计的角度问题,离地不高且距离车比较近的物体是识别不到的,比如二十厘米高的桩子,高一些的马路边沿,这些一定要注意,否则有可能会产生剐蹭。