人形机器人高壁垒环节:无框力矩电机市场格局梳理
一:机器人驱动方式
机器人驱动方式可分为液压驱动、气体驱动、电机驱动三种:
(1)液压驱动:以液体为驱动介质,适用于大型重载机器人、工业机器人等。
(2)气体驱动:通过压缩空气实现驱动,适用于气动工业机器人、医疗辅助机器人等。
(3)电机驱动:以电机作为动力源,将电能转化为机械能,应用最为广泛。
人形机器人电机可分为步进电机、伺服电机、力矩电机:
(1)伺服电机:控制精度、过载能力、速度响应等性能优异,应用最为广泛,包括四肢、躯干。
空心杯电机是一种微型伺服直流电机,体积更小、效率高,适用于灵巧手。
(2)步进电机:适用于头部、眼部等轻负载、精确运动位置。
(3)无框力矩电机:力矩电机的一种,可内置于机器人关节,占用空间更少。
无框力矩电机保留了传统电机中用于产生扭矩和速度的部分,但没有轴、轴承、外壳或端盖。
就内部结构而言,无框力矩电机只有转子、定子两个部件,利用机器自身轴承支撑转子,可将电机无缝内置。
无框力矩电机具有体积小、质量轻、功率高、适配性强等特点,主要应用于机器人关节、半导体设备、飞行控制系统、工业自动化等场景。
无框力矩电机可直接集成于关节执行器,以实现精准控制并节省空间,目前已成为主流方案:
特斯拉Optimus、宇树H1、远征A1、小米Cyberone、优必选X1、傅里叶GR-1,关节单元均使用无框力矩电机。
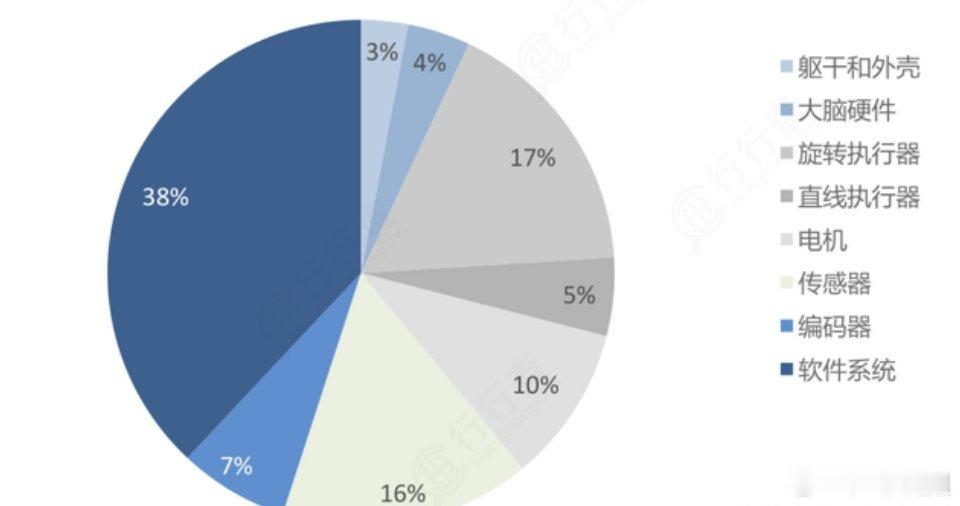
以特斯拉Optimus为例,其全身共有28个关节执行器,包括14个旋转关节、14个线性关节,共使用28个无框力矩电机:
(1)旋转关节:由无框力矩电机、谐波减速器、扭矩传感器、位置传感器、编码器等组成;肩部6个、腕部2个、髋部4个、躯干2个。
(2)直线关节:由无框力矩电机、行星滚柱丝杠、力矩传感器、位置传感器等组成;肘部2个、腕部4个、髋部2个、膝部2个、踝部4个 。
全球方面,头部厂商包括美国科尔摩根、德国威腾斯坦、瑞士Maxon Motor、德国TQ Robodrive、美国Aerotech、美国派克汉尼汾等。
国内方面,无框力矩电机目前仍存在较高技术壁垒,国内只有少量厂商提供,市场呈头部集中趋势。
国内主要供应商包括:步科股份、卧龙电驱、伟创电气、雷赛智能、昊志机电、禾川科技。
步科股份:国内无框力矩电机龙头厂商,2023年出货量约1.4万台。第三代无框电机对标国际领先产品,应用于人形机器人领域。
卧龙电驱:电机与驱动制造商,公司无框力矩电机、关节模组已与多家机器人客户送样测试,部分客户已形成小批量订单。
昊志机电:数控机床、机器人、新能车部件供应商。公司产品包括谐波减速器、无框力矩电机、力矩传感器、编码器、关节模组等。
伟创电气:电气传动、工业控制国内头部厂商。公司机器人系列产品包括空心杯电机、无框电机,均已实现小批量交付。
雷赛智能:运动控制领域国内领军企业。公司空心杯电机、FM1高密度无框电机系列产品,可应用于协作机器人、人形机器人领域。
禾川科技:工业自动化产品供应商。人形机器人运控部件产品包括伺服电机、步进电机、空心杯电机、无框电机等产品。