2024理想AI Talk
今天的理想AI Talk,智驾团队的负责人郎咸朋博士也来分享内容了。
在过去某个阶段理想的智驾沉寂了一段时间,李想对朗博说了句狠话:“郎博,下半年如果我还看不到变化,咱们还是拿不到头部位置的话,那你这个负责人就可以不用干了。”
之后,团队开始重聚思路,回归体验和用户价值,给用户做一个有更好体验、更安全、更便捷的产品,而不是说做一大堆什么从指标上看起来挺好的产品。
此时,理想内部也已经开展了端到端的预研。
郎博随后分享在第一次试驾端到端上车的智驾体验,车辆智驾能力的纵向就已经比之前试过所有的都要好的状态,才用了短短不到15天。当时郎博就建立了一个信心:就是端到端一定能做出来。而且一旦它做出来,就一定会比现在所有的智能驾驶软件都要好。
而之所以理想今年才上端到端这样的法宝,是因为需要等到有足够的数据和算力积累。
端到端 VLM大模型其实最终的本质是用人工智能来做自动驾驶。人工智能的三个要素:算法、数据和算力。
理想AD Max车型的销量,在2023年开始快速增长,到2024年初(高质量训练)数据量达到10亿(公里) 左右规模,这是一个基础。第二是算力基础,今年初我们算力也到了5EFLOPS。再加上第三步,就是端到端的一些预研也有一定成果,所以到今年初是天时地利人和都到了,开启了正式的端到端大模型上车。
理想采用的是端到端+VLM,是团队在做技术方案时充分参考了世界上所有的先进方案,但始终无法解决一个问题是,当一套自动驾驶或智能驾驶系统,它工作时如果遇到之前没有见过的场景,应该怎么处理?此时端到端+VLM,就是系统1+系统2的方式,很好地模仿人类大脑的工作方式。
直播后半程李想再度出场,也回应了一些智驾方面的问题。
张小珺:特斯拉没有用激光雷达,你们为什么要用?
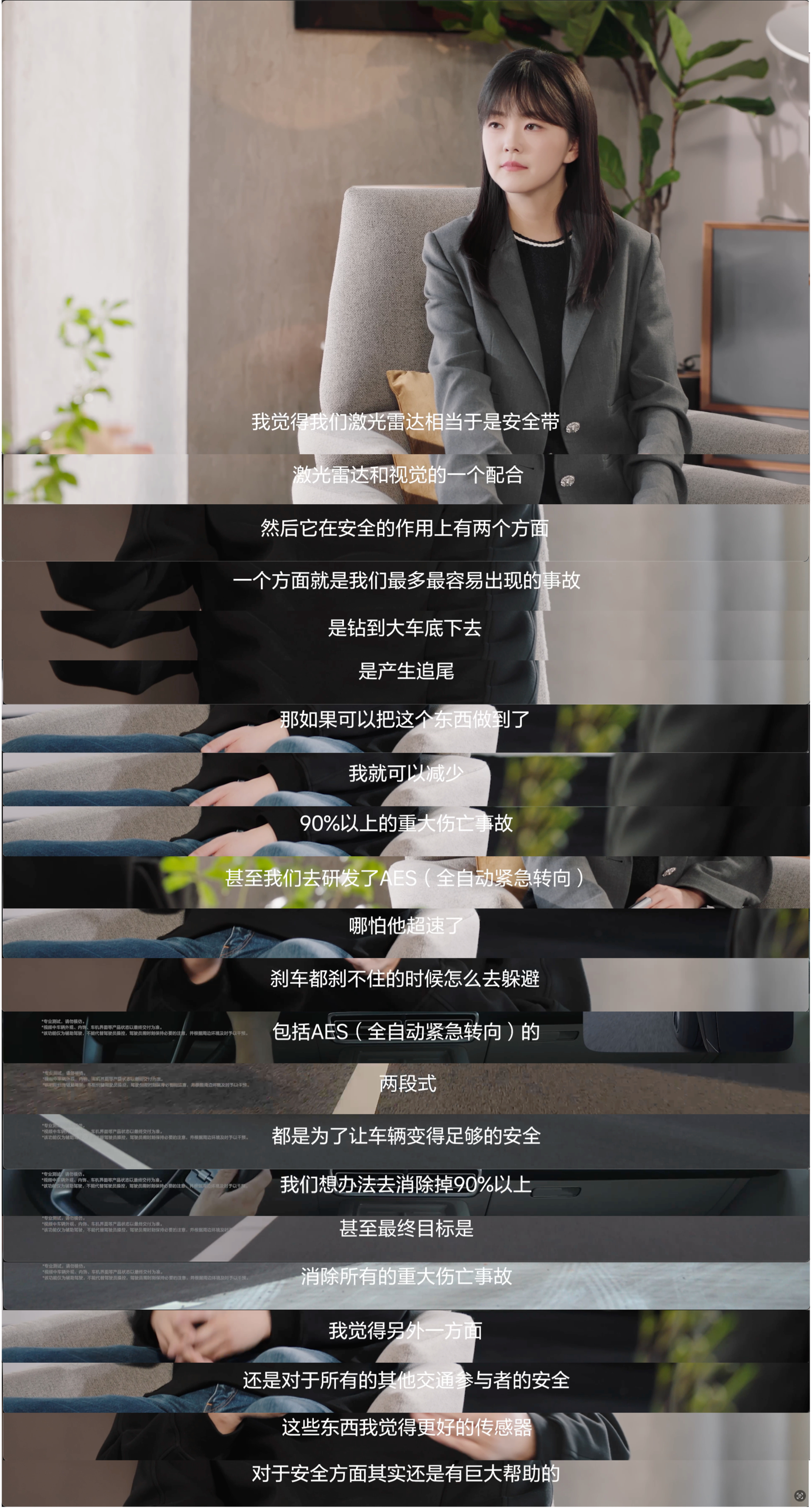
李想:很多人不太理解说:为什么要保留激光雷达,还是为了安全。是不是因为你技术不好?不是,中国和美国是不一样的,如果你经常在中国晚上夜路开车,你会看到有尾灯坏了的大货车、甚至可能尾灯坏的大货车会直接停在主路上,至少我们今天的摄像头,能够在深夜里没有光线下看到的距离,其实只有100米出头。
但是激光雷达,在没有任何光线的情况下是可以看到200米的。这就可以帮助我们实现130公里/小时的AEB自动紧急制动。那我觉得这个是非常重要的,因为我们是个面向家庭的车,每个人生命安全都非常的重要,所以这是我们继续保留激光雷达根本所在。而且后边的车型仍然会保留。我相信如果马斯克在中国,在深夜里不同的高速开过车,他也会选择把前面的一颗激光雷达保留下来。因为特斯拉对于安全同样地重视,只是他要在这个环境里来看到。
张小珺:你现在开车智能驾驶占比是多少?
李想:大概80%左右。
张小珺:剩下的20%是因为你们技术不够行吗?
李想:最主要是我赶时间。
张小珺:端到端是自动驾驶的制胜法宝吗?
李想:我觉得端到端只能解决L3,解决不了L4。
张小珺:什么时候可以100%用自动驾驶?
李想:给我三年的时间,它需要技术到位,也需要产品到位,也需要一些环境和政策到位,也需要消费者对于人工智能的信任到位。
张小珺:电动车这场仗什么时候能分出胜负手?
李想:现在中国的汽车仍然非常内卷。电动化和智能化是两场仗,电动化其实是相当于是一张门票,我认为L4会分出来真正的胜负。但是我们今天在做的所有事情,是为了L4拿门票,因为L4所需要花的钱,所需要拥有的能力,所需要的数据量,是今天所不具备的,所以今天大家要靠这个东西去拿L4的门票。
张小珺:拿L4的门票需要什么条件?
李想:足够多的车跑在路上。
张小珺:多少车?
李想:得500万辆以上。第二你要真的自己掌握 VLA(视觉语言行动模型)这个基础模型的能力。第三,你要有足够多的钱去招募最顶级的人才,以及足够的算力,有这三个条件。
张小珺:当满足这些条件且做到足够优秀时,能做出一家像苹果这样的公司吗?
李想:一定会的,一定会的。