我国航天做了什么,或者将要做什么,印度航天也做什么,或者计划也要做什么,这似乎成了近几十年的一个规律。
今年,就在我们嫦娥六号率先完成史诗级意义的人类首次月球背面采样返回任务后不久,印度航天也更新了他们的首次月球采样返回任务PPT。

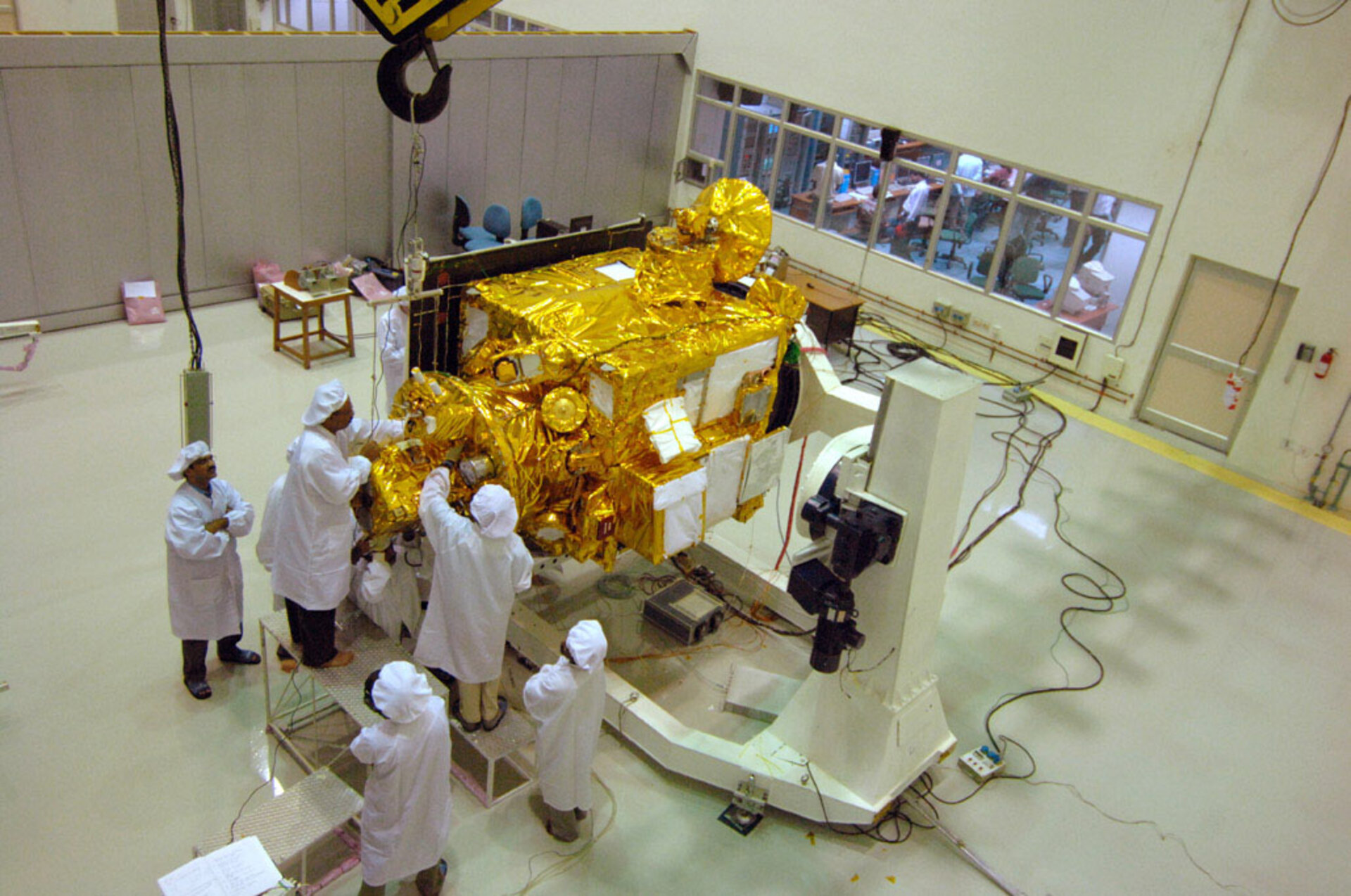
由“金蟾号月面自主智能微小机器人”拍摄的“嫦娥六号着陆器与上升器组合体”

印度航天系统PPT中展示的“Chandrayaan-4(月船四号月球采样返回探测器)”
虽然看起来印度对于我们是亦步亦趋,是紧跟再紧跟,但是话又说回来,航天工程的发展步骤往往都是趋同的。
任何航天工程都是以先获取“工程能力”为出发点,因为工程能力的有无,决定着工程能否可持续发展,也可以说是“入场券”。
什么是工程能力?
中国探月工程立项伊始就确立了“绕、落、回”三步走发展规划,在二十余年时间里,我们陆续发射了嫦娥一号、嫦娥二号、嫦娥三号、嫦娥5T1、鹊桥号、嫦娥四号、嫦娥五号、嫦娥六号等多个重量级月球探测器,其中,嫦娥一号掌握了绕月工程能力,嫦娥二号掌握了地月直接转移的绕月工程能力,嫦娥三号掌握了月球表面软着陆工程能力,嫦娥5T1掌握了月地转移高速再入返回工程能力……

十三年前,嫦娥二号第三次近月制动后,顺利进入100公里高度的圆形绕月轨道。(动态图)

十年前,嫦娥三号着陆月球表面。(动态图)

十年前,嫦娥5T1在距离月球约1.2万公里处拍摄的“地月合影”。
总结起来就是,探索地外天体通常都要解决“去得了、落得下去、回得来”这三大工程能力,浓缩一下就是我们常说的“绕、落、回”。比如,除了月球,在火星探测领域也遵循了这一规律,天问一号通过一次任务掌握了火星绕落巡工程能力,接下来的天问三号就要实现火星采样返回任务,同样也是火星版的“绕、落、回”。
放眼当今全球,此刻真正拥有月球采样返回能力的国家,有且只有一个,那就是连续取得嫦娥五号、嫦娥六号两次月球采样返回任务成功的中国。
印度航天如今真的也有这个实力吗?
大约十七八年前,我国航天与印度航天,在深空探测领域还真是伯仲之间,比如两家首次绕月探测任务,印度的月船一号当年就很想赶在我国嫦娥一号之前发射,后来他们没有如愿,嫦娥一号也仅比他们早一年抵达绕月轨道。

我国嫦娥一号探测器
印度月船一号探测器

嫦娥一号拍摄的100米分辨率月面图

月船一号拍摄的5米分辨率月面图
再后来,印度航天锁定了新目标,就是火星环绕任务,“曼加里安号探测器”在这一领域成功领先我国航天,虽说现如今我们通过“天问一号探测器”一步实现了绕落巡火星的史诗级胜利,在火星探测领域甩了印度航天N条街,但在当年,我们对他们的曼加里安号也是愤愤不平的。

印度曼加里安号火星环绕器

中国“天问一号”火星探测器
十五年前,印度月船一号探测器成功绕月后,接下来和我们一样,就是按部就班地实施月球表面软着陆任务,这就是月船二号。
五年前,月船二号任务进行时,印度航天就宣称它是世界上成本最低的登月探测器,结果没想到的是,月船二号在执行登月任务时,在距离月面2.1公里处突然来了360度翻转,翻了个筋斗,就是因为这个动作导致月船二号着陆器失去了速度控制,最终以210公里的时速撞击月球表面,月面软着陆任务失败。

印度月船二号着陆前的姿态异常(根据遥测数据制作的动画)
印度航天在实施重大任务的时候,给人的观感就是很“着急”,也有人说他们是“急功近利”。
事实上,印度航天可以算是该国众多技术领域中最靠谱的一个领域,他们之所以追求发展速度,是因为他们“拖不起”,最根本的原因是资金的严重缺乏,使得他们不得不强调任务的推进速度,有时甚至为了省钱,会省去一些重要的地面测试项目,月船二号登月失败就败在软件故障问题上,像这种问题如果地面测试到位是完全可以避免的。
真正给印度航天带来自信的是月船三号
吸取月船二号失败教训后,月船三号优化了整体设计,比如着陆器减配一台反推发动机,优化了着陆软件控制程序,增配了测距测速敏感器,数据冗余能力更强,最终一举成功登月,不仅登月成功,而且是高精度月面软着陆,实际着陆点与瞄准着陆点的位置偏差仅360米,这一指标甚至高于已经连续四次登月成功的嫦娥系列着陆器。

印度月船三号在月球表面软着陆成功,照片由月球车拍摄。

月船二号轨道器拍摄的月船三号着陆器
能取得如此优异的着陆位置精度成绩,主要是因为月船三号着陆器应用了基于地形相对导航的高精度着陆技术,着陆器可以在月面上方实时拍摄成像,将成像数据与着陆器预先储存的图像进行匹配对比,进而解算出轨迹偏差,并控制着陆器进行机动飞行,最终实现高精度月面软着陆。

印度月船三号机动避障飞行
通过月船二号、月船三号两次任务才最终收获“落月”工程能力,从这里看,还省钱吗?事实一再证明,航天工程如果单纯指望少花钱就能办成更多的事,通常是缘木求鱼。
印度真的已经具备向月球采样返回任务发起挑战的能力了吗?有没有能力,对比一下我们的嫦娥探月工程就可以知道个大概。
嫦娥系列任务都是环环相扣,几乎每一次任务都是为下一次任务打基础:
首次任务嫦娥一号选择稳妥的不断绕飞地球多次加速抬升轨道的霍曼转移方式进入地月转移轨道,进而实现绕月。
在此基础上嫦娥二号进一步拓展地月直接转移技术,进入绕月轨道后,获取了7米分辨率全月图,此图成为后续登月任务遴选着陆区的重要参考,之后又降轨至嫦娥三号预选着陆区上方约15公里处,获取了更高分辨率的着陆区月面图,同时利用降轨时机,部分验证了嫦娥三号的着陆时序动作。

嫦娥二号为嫦娥三号任务服务,降低轨道高度拍摄的预选着陆区月面图,分辨率1.3米。
嫦娥三号登月成功后就是嫦娥五号T1探测器,这是一个功能相当单一的探测器,只有一个核心任务,就是携带返回器抵达月球附近,然后实施月球近旁转向,进而进入月地转移轨道,最终成功验证近第二宇宙速度的高速再入返回技术,也就是嫦娥五号、嫦娥六号后来应用的高速半弹道跳跃式再入返回技术。

嫦娥5T1飞行器效果图

高速半弹道跳跃式再入返回——太空打水漂

十年前,返回地球四子王旗着陆场的嫦娥5T1返回器。
到了嫦娥五号任务,绕月、落月、月地高速再入返回皆已不成问题,但还要突破月面自主起飞与环月轨道交会对接技术,以实现月壤样品的在轨交接,与高效率的月面采样。这些技术还将为后续载人登月任务持续奠定基础。
通过梳理可知,想要掌握月球采样返回任务,起码要攻克如下技术难关:绕月、落月、月面起飞、月地高速再入返回,如果你想取得类似嫦娥五号、嫦娥六号那样优异的采样量,而不是像苏联月球系列探测器那样,只能获得数量极少的月壤样本,就还得攻克月表自主智能采样与环月轨道交会对接技术。
嫦娥五号环月轨道交会对接画面
印度航天的工程能力清单与之对照,已经具备的工程能力是绕月与落月,缺失的能力是:月面起飞、月表自主智能采样、月地高速再入返回、环月轨道交会对接。
根据印度规划的时间,他们将在2028年左右发射执行月球采样返回任务的月船四号探测器,也就是说,还有4年时间,来得及吗?
应当说,印度航天面对中国航天如此优秀的竞争对手,学习与借鉴是不可避免的,他们也如嫦娥系列任务的环环相扣验证相关技术一样,在已经实施的月船三号任务中也尽可能安排了一系列为后续任务打基础的实际测试任务。
比如月船三号登月成功后,在完成月球车部署,以及既定科研探测任务后,着陆器进行了一次短暂的月面起飞与再着陆操作,测试结果表明,月船三号着陆器实现了月表再起飞与横向移动,虽然此次起飞持续时间非常短暂,但也验证了测控、通信、控制技术,为月船四号实施真正意义的月面起飞与上升任务奠定了基础。

印度月船三号着陆器自月面起飞,执行横向移动飞行测试任务。

印度月船三号跳跃飞行前后的着陆点对比图
对印度“月船四号月球采样返回探测器”而言,最难的其实是“环月轨道交会对接”与“月地转移高速再入返回”。
中国探月工程是专门发射了单独的测试航天器“嫦娥五号T1”验证了月地转移与高速再入返回,印度航天目前并没有公开类似的测试发射任务,但他们也并不是毫无作为,比如在已经实施的月船三号任务中,当推进舱将月船三号着陆器送入预定轨道后,推进舱就再次点火进入月地转移轨道,成功验证了月地转移技术。

月船三号头部是着陆器,后部是轨道器,轨道器完成运输任务后,自月地转移轨道返回地球轨道。

月船三号轨道器
然而相较于月地返回任务而言,仅仅验证月地转移轨道技术是不完整的,因为它并不涉及近第二宇宙速度的高速再入大气层的弹道控制与隔热烧蚀技术。

自月球轨道返回再入地球大气层,航天器表面将产生三千多摄氏度的高温烧蚀。
不过,十八年前,印度航天已经成功发射并回收了返回式卫星,前些年也实施了载人飞船返回舱亚轨道发射与回收,在高速再入这块并不是一片空白,还是有些技术基础。

十七年前,印度航天已经掌握返回式卫星技术。图为十七年前,印度发射并回收的SRE-1太空舱。
真正一片空白的恐怕还是交会对接技术,印度航天至今莫说是难度极高的环月轨道交会对接,就连近地轨道的交会对接任务连一次都没有。
根据PPT显示,印度航天的志向是不小的,他们看不上苏联的月表直接起飞返回的较为落后的采样返回任务方案,他们看上的是,与我国类似的,基于环月轨道交会对接的采样返回方案。
反观俄罗斯未来计划进行的月球-28采样返回任务,他们用的还是月面起飞直接返回方案,仍然没有环月轨道对接设计,这就意味着印度月船四号的任务方案设计比俄罗斯更先进。
事实上,印度航天通过月船三号任务的实施,在登月领域已经展现出强于俄罗斯航天的技术实力,毕竟月船三号成功与俄月球-25号失败的事实在那摆着。

印度月船三号在月面部署了月球车
基于环月轨道交会对接技术,落月探测器规模可以适当缩小,同时采样量可以最大化,完成采样后,月面起飞到月轨进行样品交接,所以嫦娥六号的一次采样量就是苏联三次采样量总和的将近6倍。
月船四号是由6个模块组成,分别是推进舱、着陆器、上升器、转移舱、返回舱、远地点发动机舱。就其舱室组合来看,甚至比我们四舱组合的嫦娥六号还要多两舱,这并不意味着先进,反而是落后,因为他们无法将月船四号探测器组合体直送地月转移轨道,所以需要增配动力舱,但在印度人眼里,只要是多,那就是兴奋点。

印度航天部门向国际社会宣传月船四号采样返回任务
运载火箭运力有多大,航天舞台才能有多大。印度到2028年能够拿得出手的运力最强的火箭,还是现役的LVM3型火箭,该型火箭改名前的名字是 GSLV mak3,近地轨道运力10吨级,地月转移轨道运力仅3吨,由于高空发动机性能不佳,使得其高轨运力还不及我们上一代的长三乙火箭。

LVM3型运载火箭
所以,可以看到,印度虽然通过月船三号任务掌握了登月技术,但他们至今尚没有执行过地月直接转移任务。
LVM3型火箭仅3吨的地月转移轨道运力无论如何也不可能单独执行月球采样返回任务,因此他们只能另辟蹊径。
印度为月船四号选择的方案相当繁琐,需要两次发射,先在地球轨道交会对接,完成集合后再一圈一圈绕地球飞行,并不断加速抬升轨道,直至进入地月转移轨道。考虑到火箭运力,月船四号六舱组合体的在轨质量不会大于9吨,大概率是8吨级,虽然在轨质量与嫦娥六号类似,但由于其火箭运力的捉襟见肘,探测器的重量资源需要大量的向推进剂倾斜。因此他们的采样能力相较于我们而言,是完全不可同日而语的。

六舱组合的月船四号采样返回探测器
月船四号组合体抵达绕月使命轨道后分离着陆器组合体,进行登月与采样,采样样本先存储在上升器内,上升器依托着陆器为发射架进行月面起飞发射。
之后,环月等待的返回舱组合体与上升器在环月轨道交会对接,对接完成后就要进行样品转移,与我们嫦娥五号、嫦娥六号应用的棘爪式样品转移机构设计不同,从PPT画面里可以看到,他们有一个专门的转移舱,舱体表面疑似有一根机械臂,届时可能就是由机械臂将样品转移至返回舱内。
月船四号之所以不能用类似嫦娥五号、嫦娥六号的样品转移机构,主要是因为他们的返回舱尺寸太小,容不下这样的设计。

我国嫦娥五号棘爪式样品转移机构
完成样品转移与封装后,组合体分离并抛弃上升器,然后远地点发动机点火,将转移舱与返回舱组合体送入月地转移轨道,当到达下一个分离点后,转移舱再分离返回舱,接下来返回舱就独自带着月壤样品高速再入返回地球。
考虑到印度月船四号的返回舱规模相当小,并不适合海上着陆,因为在回收的时候很容易丢失,因此最好是在陆地着陆,而要在陆地着陆就必须攻克着陆位置精度较高的“高速半弹道跳跃式再入返回技术”,也就是嫦娥五号、嫦娥六号的“太空打水漂”。

太空打水漂技术能否掌握,决定了月地转移再入返回航天器的着陆精度。

精准着陆于四子王旗着陆场的嫦娥六号返回器
可以看到,印度月船四号要想成功,需要攻克的关键技术还有一箩筐,2028年是完全不可能的,务实一点,十年后的2035年倒是可能的时间点。
用户94xxx42
什么时候都不要小瞧他人尺有所短 寸有所长,做好自己的事。
思念风的云 回复 07-31 16:41
炸一听好有道理,细一想你这不是圣母吗?说的好像我们不笑话他们,他们就不笑话我们一样。[得瑟]