灵巧手是人形机器人“小脑”实现灵巧操作、人机交互的重要载体,向高集成度和 智能化发展。灵巧手是一种高度灵活、复杂的末端执行器,在机器人与环境交互中 起关键作用。灵巧手因其能够模仿人手的各种灵巧抓持和复杂操作能力,广泛应用于航空航天、医疗、智能制造等领域。根据 Statista数据显示,2021 年全球机器人灵巧手市场规模约为 11.6 亿美元,预计在2030年增长至30.35 亿美元,2022-2030 年间CAGR为10.9%。
▍近几年低成本、模块化灵巧手成为市场关注重点
机器人灵巧手作为一种新型的末端执行器,在机器人与环境的交互中起着关键作用。自20世纪70年代起,国内外高校与研究机构就对灵巧手末端单元进行了大量研究工作,从三指灵巧手再到五指仿生灵巧手,覆盖工业场景与通用场景,灵巧手的技能也从简单的抓取过渡到叠衣、拧螺丝等更加复杂的操作,通过高精度+触觉传感的方式满足实际场景下的作业要求。

早期灵巧手代表产品
自20世纪70年代,为了满足多样化作业要求,机器人手部单元开始从简单夹具过渡到仿生灵巧手,这一时期的代表产品包括日本“电子技术实验室”的Okada灵巧手、美国斯坦福大学的Stanford/JPL灵巧手,以及麻省理工学院与犹他大学联合研发的Utah/MIT灵巧手。虽然早期灵巧手看起来并不灵活,但其理论探索奠定了仿人型多指灵巧手研究的基础,为后续多指灵巧手的设计提供了宝贵的理论和实际经验。
20世纪末,机器人灵巧手进入了第一个快速发展阶段,随着嵌入式硬件的发展,多指灵巧手开始向着高度集成与感知能力方向进行技术迭代,这一时期的典型产品包括德国宇航中心的DLR-Ⅰ和 DLR-Ⅱ灵巧手,该灵巧手共集成了 25 个传感器,包括类似人工皮肤的触觉传感器、关节扭矩传感器、位置传感器和温度传感器等,在灵活度与感知能力进行升级。然而多指灵巧手也面临了制造成本高,可靠性不佳以及维护成本大等问题。因此近几年,轻量化、鲁棒性、模块化以及低成本灵巧手成为市场关注重点。
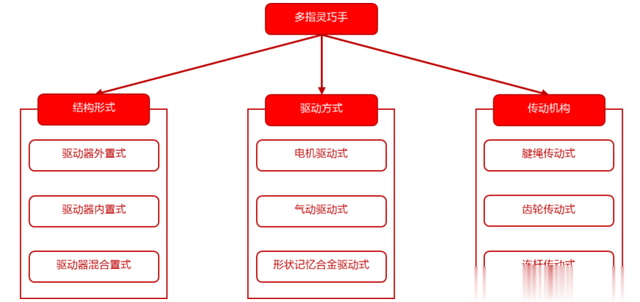
▍多指灵巧手设计、驱动及传动结构分析
从灵巧手产品设计来看,其结构方式主要分为驱动器内置式、驱动器外置式与驱动器混合制式。由于技术工艺限制,早期灵巧手通常采用外置驱动器设计,尺寸和体积较大。随着一体化关节电机的技术发展,驱动器尺寸以及传动精度有了较大提升,内置驱动器成为市场上灵巧手的主流技术路线,灵巧手的体积呈现轻量化发展。

灵巧手驱动方式对比(按驱动方式分类)
在驱动方式上,灵巧手分为电机驱动、气动驱动、形状记忆合金驱动三种主流形式。电机驱动是目前灵巧手的主要驱动形式,具备驱动强度大,传动精度高,响应速度快等优势,近几年小型灵巧手配备的伺服电机技术迭代迅速,市场上涌现了一批杰出的机器人灵巧手企业。而气动驱动的成本较低,但存在刚度低、动态性能差等性能缺陷,早期气动驱动起源于日本,通常可分为Y型夹指和平型夹指,缸径分为16mm,20mm,25mm,32mm和40MM几种。目前应用较为广泛的是日本SMC气动手指,主要用于工业场景。形状记忆合金驱动方式则更多地出现在实验阶段,这种驱动方式拥有驱动速度快的特点,但耐久度低,并不适合长期高负载使用。
机器人多指灵巧手分类
此外,在传动方式上,灵巧手又分为腱绳传动式、齿轮驱动式与连杆驱动式。腱绳传动结构简单、控制灵活但控制精度不高、抓取力不足;齿轮驱动式可以实现高控制精度,但结构复杂,成本较高;连杆驱动式能够抓取大型的物体且结构设计紧凑,但是在远距离的控制上就比较困难,抓取的空间较小。
▍未来十年或增长三倍 2030年机器人灵巧手全球市场规模有望突破30.35亿美元
知名数据库Statista预测,全球机器人灵巧手2021年市场规模约为11.6亿美元。而市场目前对于灵巧手需求旺盛,包括典型工业自动化场景、航天及危化领域、医疗保健等领域。Statista预测,全球机器人灵巧手市场规模将由 2021年的11.6亿美元增长至2030 年的30.35亿美元,2022-2030年间CAGR 为10.9%。同时,全球机器人灵巧手市场容量将由2021年的50.75万只增长到2030年的141.21万只,2022-2030年间CAGR为11.7%。

2021-2030E 年全球机器人灵巧手市场规模预测(单位:百万美元)
目前已有部分灵巧手产品进入早期探索阶段,包括航天飞行器的舱外任务、仿生假肢和远程手术、拼装流水线上小尺寸零件等。

美国NASA Robonaut机器人搭载自研灵巧手
航天探索方面,目前比较成功的案例有美国 NASA(美国航空航天局)的 Robonaut 手和 Robonaut2 灵巧手、德国 DLR(德国宇航中心)的 DLR-I 和 DLR-II 灵巧手等。DEXHAND 应能够抓住掌握太空行走(EVA)工具,并支持它们的操作:如钳子、剪刀、小型切割器、刷子、锤子、铲子、切割器、缆绳(多个)、内六角扳手和手枪握持的自动螺丝刀(并支持其扳机切换机制)。
医疗康复领域,主要集中在假肢需求,目前市售的高自由度、高性能仿生假肢手,通常使用基于模式识别的控制系统来实现多自由度假肢手关节的运动控制例如Ottobock 公司的SensorHand Speed、Bebionic 和Michelangelo灵巧手,以及Open Bionics公司的Hero Arm等。
▍国内四家头部灵巧手企业及产品一览:
腾讯Robotics X实验室TRX-Hand灵巧手
腾讯Robotics X实验室2023年4月推出旗下自研机器人灵巧手TRX-Hand和机械臂 TRXArm,得益于创新的刚柔混合驱动专利技术和自研高功率密度驱动器 TRXHand 兼具高灵巧和高负载速度的特性,拥有8个可独立控制关节,自重仅1.16 千克,最大持续指尖力可达15牛,最大关节速度不低于600 度每秒,可轻松应对不同形状尺寸物体的抓取和操作,对高动态的抛接动作也游刃有余。

腾讯Robotics X实验室TRX-Hand灵巧手
在感知能力上,灵巧手在指尖、指腹和掌面均覆盖了自研的高灵敏度柔性触觉传感器阵列,掌心处安装有微型激光雷达和接近传感器,同时每一个关节均集成了角度传感器,保证灵巧手在抓取和操作过程中能准确地感知自身与物体状态信息。
因时机器人灵巧手:RH56BFX/RH56DFX系列灵巧手
因时机器人旗下灵巧手拥有两款灵巧手系列产品,其中RH56BFX系列灵巧手又称钢琴手,速度快、抓握力稍小,集成力传感器,适用于弹钢琴及手势交互等场景。

RH56DFX 系列灵巧手抓握力大,速度适中,适用于机器人或假肢的抓取操作。值得一提的是,两者均支持ROS系统,提供专门的ROS插件,这使得这两款灵巧手更容易与其他机器人组件和系统集成。
智元机器人SkillHand灵巧手
今年8月,智元机器人举办了2024新品发布会,发布了“远征”与“灵犀”两大系列共五款商用人形机器人新品——远征A2、远征A2-W、远征A2-Max、灵犀X1及灵犀X1-W。其中全新升级的SkillHand灵巧手自由度数跃升至19个,主动自由度升至12个,并引入基于MEMS原理的触觉感知和视触觉感知技术。高精度力控7自由度双臂,能精准执行阻抗控制、导纳控制、力位混控等多种力控任务,也支持双臂拖拽示教模式和可视化调节。

值得一提的是,SkillHand的指尖集成了基于视觉的指尖传感器,可以分辨操作物的颜色、形状、材质,而且可以基于算法的数据融合,做到近似触觉的压力传感器的效果。同时,该灵巧手创新的指尖传感器视觉闭环的设计,可以实现末端的视觉闭环,降低了对于整机电机的精度需求。
帕西尼DexH5 GEN1、DexH13 GEN2灵巧手
帕西尼感知科技旗下拥有两款灵巧手,分别为DexH5 GEN1和DexH13 GEN2,其中帕西尼DexH5 GEN1灵巧手搭载了数百个触觉传感单元和先进的人工智能算法,使其能够像人手一样自主实现各类常见操作。

帕西尼DexH5 GEN1灵巧手
DexH5 GEN1的手指表面配备了自研高精度三维力传感器,精度可达0.01N,确保了精准控制握持力。其负载能力高达5Kg,满足大部分工作环境要求。此外,DexH5 GEN1的手指采用三段结构,弯曲角度与人手自然弯曲角度近似,更加符合人类生产需求。
DexH13 GEN2则是市场上首款融合多维触觉与AI视觉双模态能力的四指仿生灵巧手,该灵巧手搭载了世界上最多的1956颗专业级ITPU多维触觉传感器,同时DexH13 GEN2还集成了800万高清AI手眼相机,结合先进的零样本位姿估计视觉算法,使其具备了卓越的AI视觉物体位姿估计能力。

帕西尼DexH13 GEN2灵巧手
在自由度设计上,DexH13 GEN2采用了高度灵活的结构,实现了13个自由度,不仅能够实现精细夹取、重物托举等操作,还能完美模拟人手的抓取、旋转、拿捏等复杂动作。其触觉传感器可在1000Hz采样频率下测量法向力、摩擦力等15种触觉信息,全量程内保证0.01N的高精度。
