一.精密测量的数学方法
1989《精密测量的数学方法》由于是年代较久的资料都绝版了,几乎不可能购买到实物。

本书系统地介绍了精密测量的基本理论和近代数学方法, 精密测量的试验设计,数据处理,评定准则,理论依据和 计算方法等。
精密测量的数学方法是目前为止,唯一的系统性提供精密测量的相关拟合算法及细则的专业书籍。
由熊有伦编著 1989 北京:中国计量出版社
前言:
1986年春,为了适应计量测试学科发展的需要,由李柱教授主持,在华中工学院举办了“全国标准化和计量测试讲师研讨班”。本书原讲义是应研讨班的急需摆写的。精密测量作为人类对于客观世界认识的窗口,作为人类改造客观世界的必要手段,不仅在我国四个现代化的建设中起到重要作用,而且对人类的认识论产生深远的影响。近年来,随着微型计算机的应用和普及,精密测量技术正处在一个飞跃阶段。这一阶段的持点之一,就是计算机辅助精密测量伴随而来的数学模型的建立和数学方法的应用。本着这个精神,本书在介绍精密测量中常见的数学方法的同时,闸明它们在各类密测量中的应用,待别是在几何量测量中的应用,闸明计算机辅助测量原理和数学方法。
在本书的第一章中,列举了几个有代表性的例子。它们都是精密测量中遇到的实际问题,其中一些问题引起了普遍的重视。引进这些实例的目的,一方面是想使从事这类测量工作的技术人员,根据实际问题的具体要求,提出相应的数学问题;另一方面也想使数学工作者和大学生,研究生了解相应数学问题的实际背景。
本书大致可分四部分:第一部分包括第二、第三和第四章,讨论精密测量的线性静态模型,包括线性统计模型和综合确定统计模型。第二章是预备知识,掘要介绍精密测量数据处理的代数结构,最小二乘解、最小范数解、广义逆及其应用实例;第三章介绍线性统计模型建立的方法,估计理论、估计方法和误差理论;第四章介绍带约束条件的最优估计方法,即条件观测的有关理论和应用,它可以看成是前两章的综合解,是实验设计的理论基础。该章详细地介绍了交汇量法、红合量法和多维传感器的试验设计。
第二部分包括第五。第六两章,讨论精密测量的线性动态模型。第五章介绍线性动态系统参数估计、阶的检验和递推算法;第六章介绍卡尔曼滤波在粘密测量中的应用。
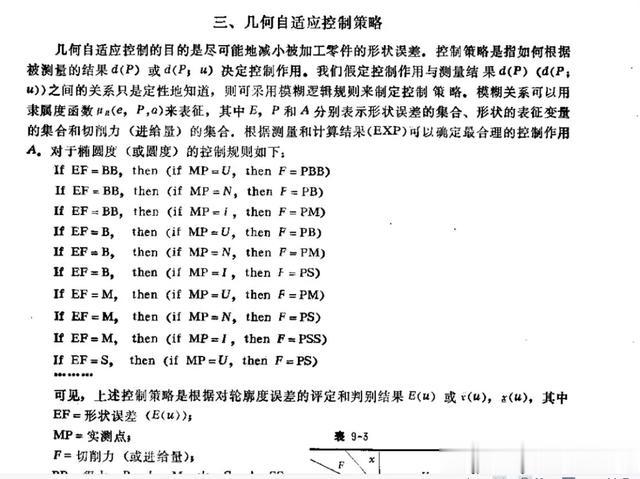
第三部分包括第七至第十章,讨论精密测量中的极差极小化(包括Minimax)方法及其在评定形状位置误差中的应用。第七章介绍线性极差极小化的理论和方法及其在模式识别中的应用;第八章应用极差极小化理论建立形状误差的评定和判别方法,构成比较完整的评定判别体系;第九章讨论线轮度、而轮廊度的评定和判别,建立了数学模型,并引入维数概念;第十章讨论孔组复合位置度的评定和判别。
第四部分包括第-和第十二章,讨论几何量测量中最为活跃的两个方面:三坐标测量机和主轴回转精度测量。第十一章介绍三坐标测量中的数学问题。讨论了三坐标测量机的检定、校准和误差修正等问题;第十二章介绍主轴回转误差测量中的若干理论问题:可观测性、可分离性、分离方法、评定方法和周期性分析等。
“各部分之间有一定联系,也有一定的独立性,可以根据需要摘取其中任一部分阅读,对连贯性不会有太大影响。第十一和第十二两章虽然和以前各章均有联系,但是对于实际工作的同志来说,并不追求理论的完整性和连贯性,也可单独阅读。
在撰写和修改的过程中。李柱教授、杨叔子教授给予了极大的鼓励和帮助;本书的揉写成功,与朱启述、江天一、李光藻、刘恩沧、胡乾斌、程德云、刘俊、刘正林等老师的支持和帮助分不开;在讲师研讨班的讲解过程中,各兄弟院校的老师租同志们提出了宝贵意见和建议;此外,还得到王跃科、姚彩伯、何可敬等同志的合作和帮助,在此表示枣心感谢。在定稿的过程中,中国计量出版社刘瑞清、陈小林等同志提出了指导性意见,在此深表感谢。
由于水平所限,错误在所难免,欢迎批评指正,
作者1987年11月
华中工学院




















.

很多人,无法把数学逻辑变为软件程序。他们如果把这些算法变为软件程序,国产工业软件早就搞出来了,国产系统早就搞出来了。
二.熊有伦


熊有伦(Xiong Youlun,Professor),1939年出生,湖北枣阳人,1995年当选中国科学院院士。长期致力于机械工程中机电控制与自动化及其有关理论和技术的研究,建立了国际首个精密测量的评定判别理论;换刀机械手在国际上实现了零的突破;机器人离线编程系统填补国内机器人研发空白;发动机类零件的快速测量、数字建模及面向制造的设计实现了我国汽车发动机类零件制造技术质的飞跃。主持包括国家自然科学基金“九五”重大项目《支持产品创新的先进制造技术基础研究》、重点项目《网络环境下的数字制造理论与关键技术》、自然科学基金项目《集成机器人装配规划与操作的几何推理方法研究》、973课题等多项国家级重大课题,在机器人技术、数字制造、电子制造等研究领域取得突出成果,发表论文200余篇。出版《机器人学:建模、控制与视觉(第二版)》、《机器人操作》、《精密测量的数学方法》等书籍,培养博士研究生40余名,获全国教材建设奖一等奖、国家科技进步二等奖/三等奖、国家技术发明二等奖、国家教委科技进步一等奖/二等奖各1项,省部级一等奖5项。熊有伦院士兼任机器人技术与系统国家重点实验室、高性能复杂制造国家重点实验室学术委员会主任、《中国科学-E辑》、《科学通报》编委等职务。
2.1承担的科研项目:
长期致力于机械工程自动化方面的研究工作,主持国家重大科研仪器设备研制专项“高超音速流场实时精确测量系统的研制与应用”、重大项目“支持产品创新的先进制造技术中的若干基础研究”、重点项目“大型复杂曲面零件的数字化设计-加工-测量一体化理论与技术”等多项国家级重大课题,在数字化制造、机器人操作、精密测量理论等方面取得重大成果:
1)在数字化制造方面,建立旋量空间几何推理的层次结构和计算方法,提出大规模点云处理(如曲面拼合、分割、特征提取等)的高效方法,开发出集成快速测量、数字建模及面向制造设计于一体的系统平台,达到国际先进水平,在东风汽车有限公司、湖北三六一一机械厂等多家单位得到广泛应用,显著提升了企业自主创新能力,新增产值近6亿元。获2004年度国家科技进步二等奖,被评为2004年机械工业科学技术重大进展之一;
2)在机器人操作方面,在国际上首次设计出具有偏置连杆结构的换刀机械手,具有独创性,换刀动作灵活、准确、可靠,居国际领先水平;建立复合夹持的封闭性、可达性和可接近性理论,在国际著名期刊IEEE Trans ASE,ASME Trans MSE等上发表论文20余篇,出版了该方向我国第一本专著“机器人操作”。提出J-函数新概念和基于J-函数的碰撞、干涉检验方法,为冗余度和欠自由度机器人设计、分析和轨迹规划提供了统一的准则和方法;主持开发了基于微机的机器人离线编程系统HOLPS,有效地提高机器人编程水平,获1995年度国家科技进步三等奖;
3)在精密测量理论方法,建立了形状误差评定和仲裁的极差极小化理论,提出统一判别准则和代数判别方法,实现了智能仲裁。在直纹面的判定,特征参数估计和复杂曲面的评定与判别等方面取得了创新性成果,所著的“精密测量的数学方法”一书和有关论文被国内外广泛引用,产生了重要影响。
2.2论文专著与专利1.熊有伦. 机器人技术基础, 华中科技大学出版社, 2011
2.熊有伦, 尹周平, 熊蔡华等. 机器人操作, 湖北科学技术出版社, 2002
3.熊有伦. 精密测量的数学方法, 中国计量出版社, 1989
4.Y. L Xiong, T Xiong, Y.H Wang.Algebraic test of relative form closure grasps with its implementation. ScienceChina-Technological Sciences, 2014, 57(7):1401-1410
5.Y.L Xiong, X.R Xiong. Algebraicstructure and geometric interpretation of rigid complex fixture systems. IEEETransactions on Automation Science and Engineering, 2007, 4(2): 252-264
6.Y.L Xiong, H Ding, M.Y Wang.Quantitative analysis of inner force distribution and load capacity of graspsand fixtures. ASME Journal of Manufacturing Science and Engineering, 2002,124(2): 444-455
7.Y.LXiong. Theory of point contact restraint and qualitative analysis of robotgrasping. Science China-Technological Sciences, 1994, 37(5): 629-640
8.J. B. Wu, Z. P. Yin, Y. L. Xiong.The fast multilevel fuzzy edge detection of blurry images. Ieee SignalProcessing Letters, 2007, 14(5):344-347
9.Z. P. Yin, H. Ding, Y. L. Xiong.Geometric reasoning on molding planning for multishot mold design. ASMEJournal of Computing and InformationScience in Engineering, 2006, 6(3):241-251
10.W. Q. Hu, W. Y. Yang, Y. L. Xiong. An adaptive meshmodel for 3D reconstruction from unorganized data points. International Journalof Advanced
Manufacturing Technology, 2005, 26(11-12):1362-1369
2.3荣誉获奖:1.“高性能无线射频识别(RFID)标签制造核心装备”于2013年获国家技术发明二等奖,第三完成人;
2.“发动机类零件的快速测量、数字建模及面向制造的设计”于2004年获国家科技进步二等奖,第一完成人
3.《机器人操作》于2004年获湖北第二届图书奖,第一完成人;
4.“基于微机的机器人离线编程系统HOLPS及其应用”于1995年获国家科技进步三等奖,第一完成人;
5.“精密测量的评定判别理论”于1990年获国家教委科技进步一等奖,第一完成人。
