软体机器人技术正在掀起一场科技革命,而中国科学技术大学的研究团队在这一领域取得了重大突破!他们提出了一种全新的模块化设计方法,利用多模态单元实现了磁控软体驱动器的快速设计和多功能应用。这项技术不仅让软体机器人变得更灵活、更智能,还为机器人技术在医疗、工业、日常生活等领域的应用打开了新的大门。

这项研究的灵感来源于自然界中的蚯蚓等环节动物。研究团队通过模仿蚯蚓的节结构,设计了一种多模态磁驱动单元。这种单元可以在同一磁场驱动下,实现收缩、弯曲、扭转、体积变化等多种变形模式。这种设计不仅解决了软体机器人变形控制的难题,还让机器人能够适应更复杂的任务和环境。

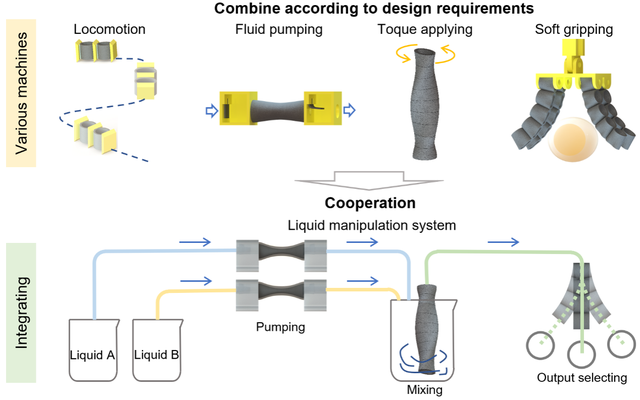
研究团队展示了这项技术的多种应用场景。例如,他们利用收缩模态单元设计了一种无绳驱动的爬行机器人,能够实现速度和方向可控的运动。此外,他们还开发了一种磁控软泵,避免了传统机械泵的磨损和锈蚀问题,特别适合在潮湿环境中使用。更令人惊叹的是,利用弯曲模态单元设计的磁控软抓手,能够轻松抓取蒲公英、生鹌鹑蛋、鲜花、薯片等脆弱和易变形的物体,展现了极强的适应性。
这项技术的突破不仅限于宏观领域,研究团队还将单元尺寸缩小到微米级,设计了毫米级的磁控钩爪,能够深入狭窄缝隙中勾取掉落的物品。这种微型化设计为微细操作和医疗机器人领域提供了新的可能性。
中国科大的这项研究,不仅推动了软体机器人技术的发展,还为未来机器人的多功能化和智能化应用奠定了基础。这项技术将如何改变我们的生活?它会在哪些领域最先实现商业化应用?欢迎在评论区分享你的看法,一起探讨软体机器人的未来!
参考资料:https://doi.org/10.1002/adfm.202415690
