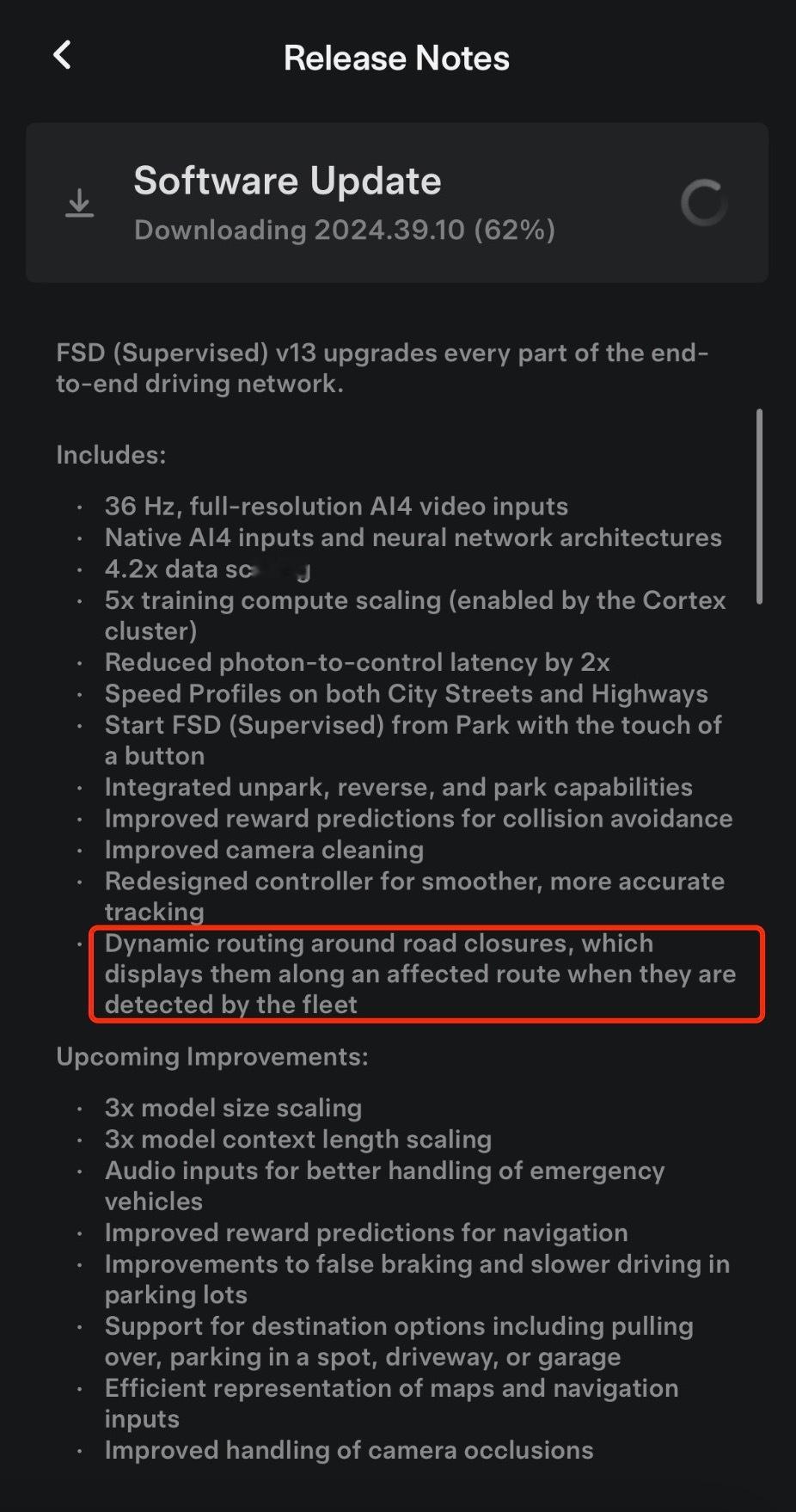
特斯拉在 FSD v13 更新中推送了一个看着不太起眼的功能:动态绕过封路路段,当特斯拉车队检测到导航路线受限时,会在该导航路线中显示这些封路信息。
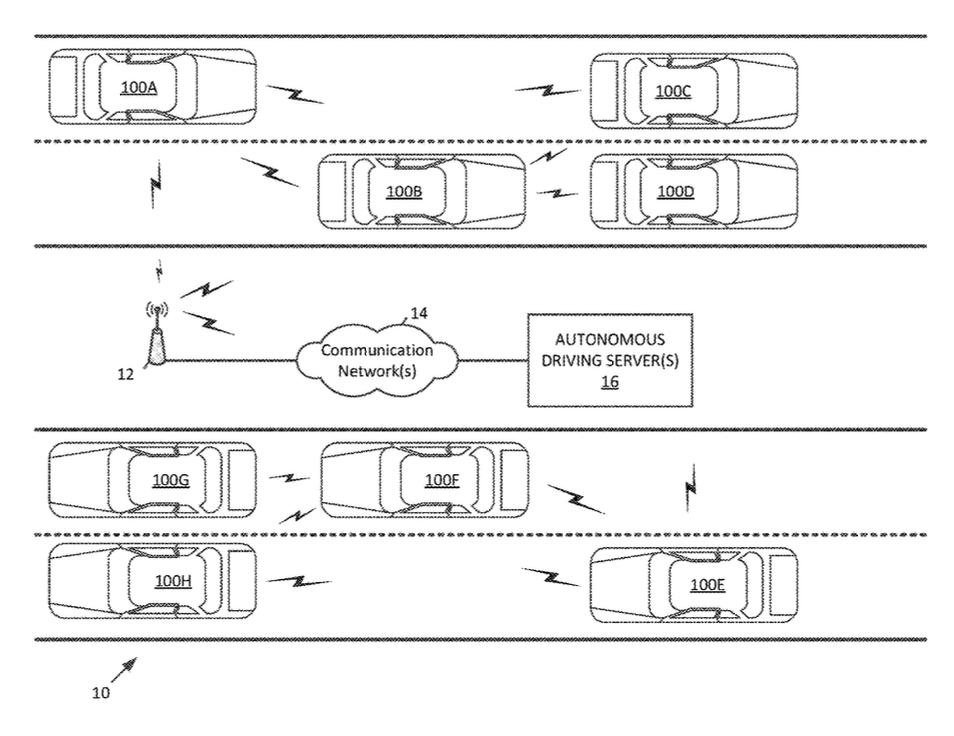
当你卷完了车位到车位,下一步卷什么?就是卷这些更长尾的场景。V2V 车辆对车辆通信。
要实现这个功能,肯定得有第一台趟坑车,这台车开进去,发现这段路被封了,需要绕道。Ta 再通知所有会经过这段路的特斯拉车辆。
这就是典型的长尾场景,因为必然是临时封路或突发事故或死胡同,时间不久,因为一久的话…导航信息就更新了,也就会绕开了。
所以这是个优先级不高但还必须得做的功能,因为你也不能硬等导航更新,前仆后继让一台又一台 FSD 跑进去造成大堵车。
之前 Cruise 在旧金山就有一次,十辆 Cruise 挤在一个路口,系统又都是保守驾驶风格,彼此不通信,远程通信调度偏偏坏掉了...就完全尬住。自动驾驶汽车不改善交通,还摧毁了交通,这就闹笑话了。
但 V2V 或者说 V2X 过去传统品牌早有布局,这也值得吹?
过去的 V2X 存在一个问题,就是无法商业闭环,车端、路侧、云端,用的都是专用软硬件,回答不了谁来付费,车主?路政?车企?V2X 产生的价值不足以支撑为此投入的资源。
所以要做 V2V,必须是低成本、高可靠的,对应 V2V 所在的长尾场景的应用价值的。
特斯拉在研发 HW 3.0 芯片的时候申请了一个「自动驾驶控制器加密通信」专利,在 HW 3.0 上设有专用的安全处理器子系统 SCS 和安全子系统 SMS,通过私有密钥来加密车对车的通信。通信信息也被保存在专用内存上,CPU 和 NPU 无法访问,这是防止被黑客恶意欺骗车辆。
3.0 就有的话,相信 AI4 和 AI5 也都支持了,只不过特斯拉不再公开这些信息了。