新能源又卷什么新科技了 基于端到端大模型的纯视觉高阶智驾。另外,听说 OpenAI 将在2027年发布 GPT-10,从AI进阶到AGI(通用人工智能)其智商超过全人类智商总和,而且比预计的2030年发布还提前了3年。AGI 的出现,让AI不再局限于某个特定领域,如智驾,而是可以学习和研究世界知识,以及学习人类无法理解的高维度知识。如果AGI移植到机器人身上,那么,硅基生命就诞生了。
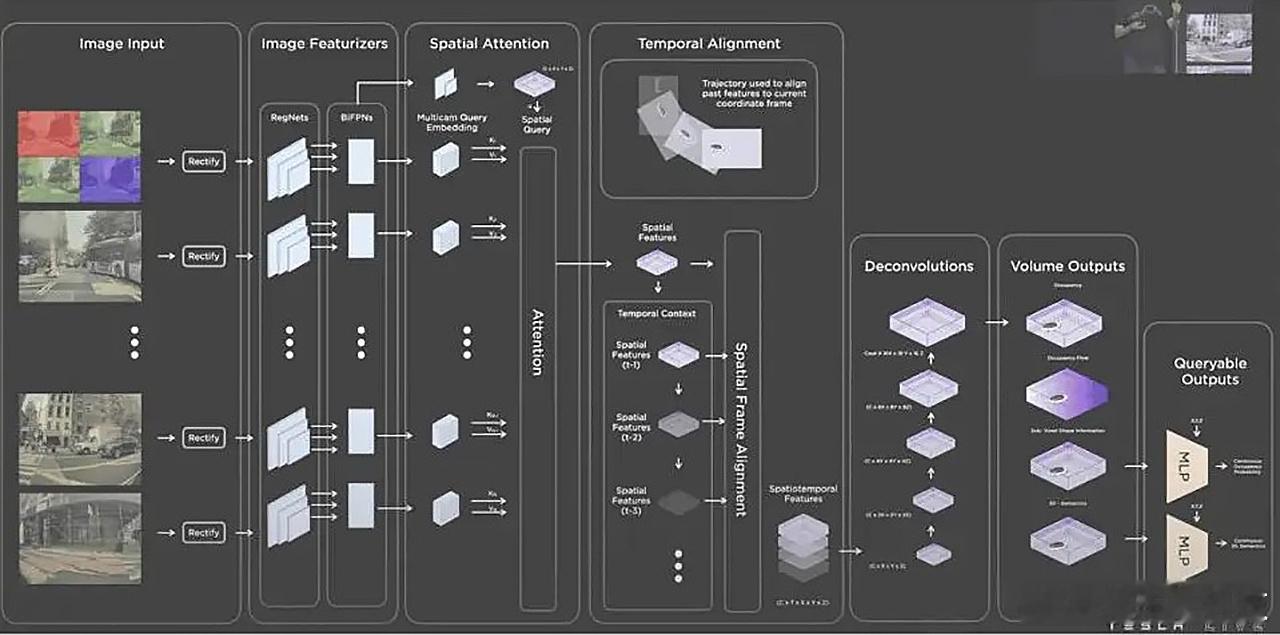
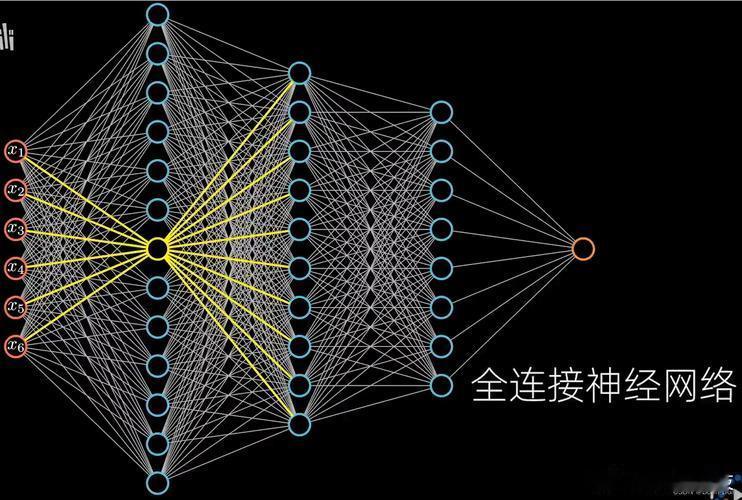
端到端大模型(End-to-End Large Model)通常指的是一种人工智能模型,它能够处理从输入到输出的整个任务流程,而不需要人为地进行特征标定或多个阶段的处理。这种模型通常具有大量的参数,能够从原始数据中自动学习到复杂的特征表示,从而在特定任务上达到较高的性能。
翻译一下:就是机器能自动从数据中学习到有用的特征,减少了对人工设计的依赖。
再白话文一点:就是机器能自己学习世界知识,跟人一样有逻辑判断和预判性。举个简单的例子,车辆 “看见” 广告牌上的车或者特殊的树影,不会被识别成真的障碍物,从而避免幽灵刹车,并能做到 “举一反三” ,再遇到其他类似情况时凭 “经验” 行事。
另外,相比高基建成本的 V2X(车与万物相连),单车感知的端到端大模型是最容易实现且成本更低还好用的自动驾驶方案。这里不得不提一嘴马斯克的话:人靠眼睛(纯视觉+脑子(大模型))开车,汽车当然也可以。
端到端大模型对于高阶智驾来说有什么用?
环境感知:端到端大模型可以通过深度学习从大量数据中学习到复杂的环境特征,从而提高感知的准确性。
决策制定:通过学习大量的驾驶行为数据,形成有效的决策模型,提高如变道、加速、减速等决策的合理性和安全性。
行为预测:预测其他车辆和行人的行为对于自动驾驶系统的安全性至关重要。
多任务处理:如导航、避障、交通规则遵守等。端到端大模型可以同时处理这些任务,提高系统的效率和鲁棒性。
数据驱动的优化:通过不断学习新的数据,不断优化自身的性能,适应不同的驾驶环境和条件。
减少人为干预:传统的自动驾驶系统可能需要人为设计许多规则和算法,而端到端大模型可以通过自学的方式减少这种依赖,提高系统的自动化程度。