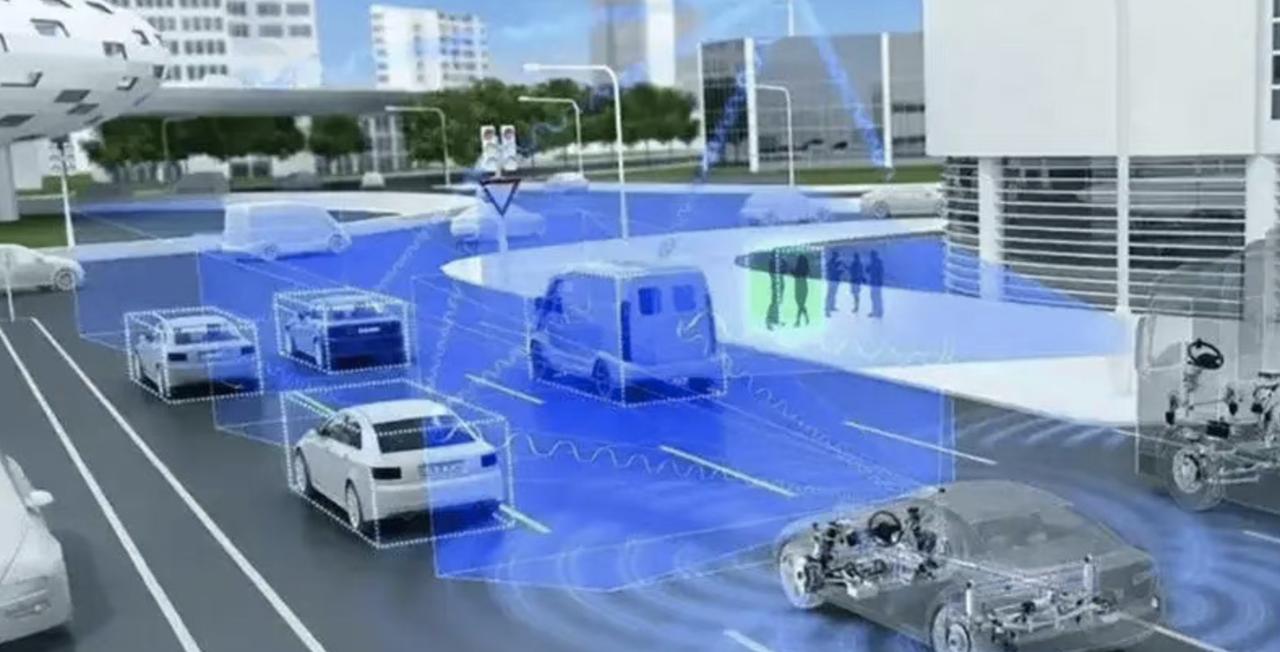
【马斯克用省略号回应小鹏新车或放弃激光雷达,它的潜台词是什么?】 看到小鹏新车或将放弃激光雷达,转而特斯拉的纯视觉方案,马斯克回复了“……”,是无语吗? 给我的感觉,更多的是“兄弟,你终于想明白了”。 关于智能驾驶的纯视觉方案,还有激光雷达方案,在我的《一本书读懂智能网联汽车》中有详细的介绍,那么这两个方案的优劣势是怎么样的呢? 1. 纯视觉方案: 优势: 成本更低:相较于激光雷达,摄像头成本更低,这使得整个智能驾驶系统的成本更为经济,有利于智能驾驶技术的普及和大规模生产。 硬件普及:摄像头在整个行业的应用已非常广泛,方便集成和扩展,降低了技术门槛和研发成本。 信息丰富:摄像头可以捕捉到丰富的颜色和纹理信息,有助于理解复杂的场景和标识,提高智能驾驶的环境感知能力。 算法训练与数据处理简化:纯视觉方案使算法训练和数据处理变得更为直接和统一,因为所有传感数据均来自同一类型的源——摄像头。这种单一的数据类型简化了数据融合的过程,降低了处理多种传感数据时出现的不匹配和解析错误的可能性。 快速迭代与功能部署:由于系统架构相对简单,纯视觉方案能够迅速通过软件更新来改进智能驾驶功能,这种灵活性使得用户能够经常收到功能改进和新特性。 局限: 光照敏感:纯视觉方案在极端光照条件下(如直射日光或夜间)性能可能下降,影响车辆的判断和反应能力。 感知限制:纯视觉方案在距离的估计和3D信息的获取上不如激光雷达精确,特别是在远距离和复杂场景下。 环境适应性不足:在复杂的气象条件下(如雨、雾等),纯视觉方案的性能可能受到影响,导致感知能力下降。 2. 激光雷达方案: 优势: 精确测距与三维建模:激光雷达能够提供精确的3D空间信息和距离测量,有助于精确物体定位和避障,提高智能驾驶的安全性。 适应条件强:激光雷达在各种光照和天气条件下都能稳定工作,对光照变化不敏感,确保感知信息的持续有效。 数据采集能力强:激光雷达能够快速扫描环境,为动态对象的检测和跟踪提供实时数据,增强智能驾驶的实时性。 安全性与舒适性提升:激光雷达能够直接检测车辆姿态指向和运动方向,给出稳定的检测信息,让智能驾驶能够准确占位或友好避让,提升驾驶的舒适性和安全性。 局限: 成本较高:激光雷达的成本相对较高,增加了系统的总体费用,可能影响智能驾驶技术的普及速度。 系统复杂:激光雷达的数据处理和解释要求高性能的计算资源,提高了系统的复杂性,增加了技术实现的难度。 信息有限:虽然激光雷达能够提供精准的距离和形状信息,但无法获取颜色或纹理等详细视觉信息,需要结合其他传感器进行互补。 那么,从上述两个方案的优劣势来看,你觉得未来哪一种方案是智能驾驶的主流呢?【来自懂车帝车友圈】











有钱的激光雷达肯定是必配的