
百度Apollo抢在特斯拉之前发布第六代Robotaxi的新车和方案,并官宣将于年底收支平衡,2025年实现盈利。跑步向前的萝卜,正在与百度Apollo一起,逐渐找回自己应有的节奏。
文丨智驾网 零酱
编辑丨浪浪山与明知山
困于热搜多日的百度,终于凭自身业务,好好地冲了回热搜。

5月15日,百度在Apollo Day官宣,旗下L4自动驾驶业务萝卜快跑正式上新第六代无人车,同时全球首个支持L4级自动驾驶的大模型Apollo ADFM(Autonomous Driving Foundation Model)也一同发布。
让我们放下手中的海参,恭喜百度三秒钟。
同日,百度也公布萝卜快跑的盈利预期:
“ 百度Robotaxi项目萝卜快跑,2024年底武汉要实现收支平衡,到2025年进入全面盈利期,萝卜快跑将成为全球首个实现商业化盈利的自动驾驶出行服务平台。”
这是百度Apollo在今年4月喊出“1亿营收、1亿利润”新目标之后的第一个里程碑事件,顺便给了企图在8月8日在华测试Robotaxi的特斯拉一记窝心脚,可喜可贺。
虽然加了限定词“武汉”,但这一盈利预期对于L4自动驾驶行业依然重要。
元戎启行CEO周光在三月中旬公开“反水”L4后,自动驾驶圈奋起反击,接连爆出N件大事,包括但不限于:
5月8日,据《中国日报》报道,特斯拉提出想在中国落地“无人驾驶出租车(Robotaxi)”,中国政府或先支持其在国内测试、作示范,但暂未完全批准其FSD在华全面落地。
5月7日,Wayve宣布,已完成10.5亿美元(约合人民币75.78亿元)C轮融资。Wayve表示,本轮融资将支持Wayve全面开发和推出首款用于量产车辆的具身智能产品,该产品将使主机厂能够高效地将汽车升级到更高水平的驾驶自动化,从L2+辅助驾驶到L4自动驾驶。
5月1日,《杭州市智能网联车辆测试与应用促进条例》正式施行。杭州成为除经济特区外,全国首个以地方立法明确自动驾驶车辆上路具体流程的城市,也是全国首个为低速无人车立法的城市。
4月29日,曹操出行向港交所递交上市申请,其在招股书中表示一部分募集资金将用于投资自动驾驶。
4月26日,小马智行、丰田共同成立新公司骓丰智能科技,注册资本7.98亿元。首期计划在中国市场投放千台规模铂智4X L4级无人驾驶Robotaxi,并在主要一线城市通过小马智行的运营平台提供无人驾驶Robotaxi出行服务。
4月7日,滴滴自动驾驶公司、广汽埃安共同出资成立安滴科技,注册资本4.2亿元。合资公司首款商业化Robotaxi量产车计划在2025年推出。
以及萝卜快跑的盈利预期。
沉寂多时的L4,忽然被多管强心针催醒,仿佛各个手握盈利秘籍。
赚钱嘛,不难,只要做到两件事就可以了:
开源。节流。
01.
节流
当我们说谁谁很会过日子的时候,总会说一句话:“一分钱掰成两半花”。
百度贪心,将这句话具象成“成本降低一半,算力提升十倍”,并以此为目标,打造了萝卜快跑第六代无人车—— 颐驰06。
新车外观设计融合了SUV与MPV的元素,采用空间飞梭式车身,其4765/1885/1715mm的车身尺寸和2830mm的轴距,为二排乘客提供了媲美行政座舱的乘坐空间。

针对出行服务场景,颐驰06配备电动侧滑门,结合大开口、低踏板设计,确保了用户在各种场景下的上下车安全与便捷。新车提供了密码解锁与蓝牙无感解锁两种解锁方式。
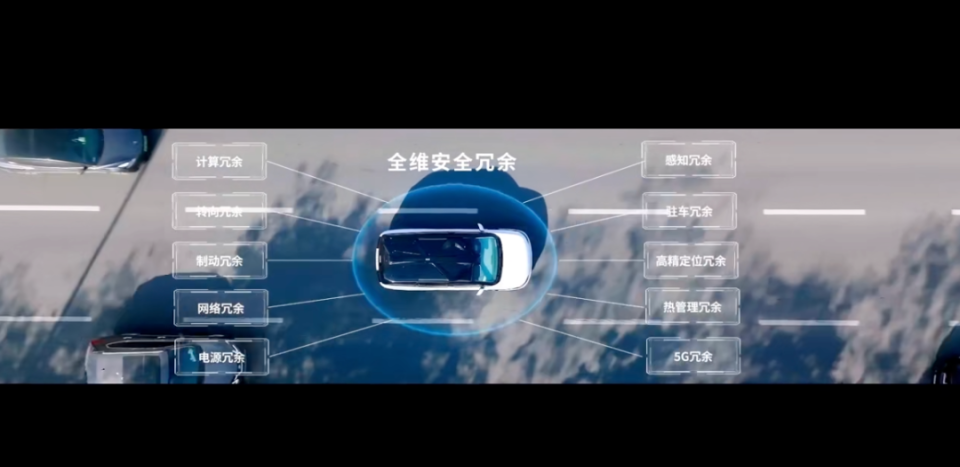
颐驰06拥有1200tops双 AI多核芯片、 7类40个传感器、 在感知、计算、高精度定位、转向、制动、驻车、网络、热管理、5G、电源等十个领域的冗余设计全面应用了“百度Apollo ADFM大模型+硬件产品+安全架构”的方案。

最为重要的是,颐驰06售价20.46万元,比第五代无人车的48万便宜60%,超额完成任务。
在认识了新车之后,百度自动驾驶业务部总经理陈卓和百度汽车机器人部总经理尹颖给媒体算了一笔账。
先从最简单的车价算起,由于技术的进步,自动驾驶传感器在成本正不断下降的同时性能不断提升,可以在保证功能的前提下,既降单价又减数量。
以激光雷达为例, 百度Apollo 无人车所搭载的64线激光雷达,成本高达50万元。但近两年,得益于本土激光雷达厂商的快速崛起,使得激光雷达成本不断下探成为可能。这让原本高于车辆价格的固件价格直接与车价拉平,大幅降低了新车的成本。
我们按照每台车运营五年来算个除法:
单车价格÷(365*5)=单日车辆成本。
可以得出:第五代无人车的单日成本是263元,而第六代无人车的单日成本是112.1元。
这一价格已经低于跑网约车司机的租车成本,而百度Apollo的省钱招数还不止于此。

颐驰06作为江铃集团新能源与百度Apollo共同开发的原生的智能出行产品,其每个环节都为规模化无人驾驶运营而打造,其中一点,就是新车学习了蔚来为新能源乘用车趟出的最为独特的道路:换电。

第六代无人车采用换电模式。所有车辆会根据服务状态、位置信息、电量情况,被自动调度到换电站完成换电。完成换电后,车辆驶离换电站,继续为用户提供服务。
对于无人车来说,换电的益处显而易见——省时省人。
如果常规的充电桩方式充电,一辆车最少需要半小时,而换电,只需3分钟,这将大幅增加无人车的运营时间,为增加客单量提供更多可能。
另外,相比于充电需要人工插拔充电枪,换电全流程可以实现完全的自动化,既节省了这部分人工成本、自动化的效率还更高。

陈卓透露,采用换电后,无人车仅在单次补能这一个环节可以节省接近小一个小时的时间,更何况有萝卜快跑整体有超30项全自动管理单元,扩大到整体车队来计算,这部分省出来的营运成本的降幅十分可观。随着萝卜快跑全自动无人车运营网络完成建设,营运成本降低30%。随着更多的无人车被投入使用,整体营运成本还会进一步下降。

百度Apollo首批交付的第六代无人车,将从即刻起在武汉投入使用,年内在武汉完成千台无人车的部署。
最后,降低的还有安全保障成本,得益于自动驾驶技术的进步,人车舱效率的持续优化,这方面的成本降低80%。
这部分我们放在下一环节细讲。
02.
开源
百度Apollo在节省成本层面,做到了单车/营运/服务三个维度,而在收入侧,想要实现提升收入,有且只有两条
即提升自动驾驶技术、扩大运营范围,这两者互为因果,相辅相成。

在技术层面,百度Apollo发布了全球首个支持L4级自动驾驶的大模型Apollo ADFM(Autonomous Driving Foundation Model)。
百度Apollo ADFM基于大模型技术重构自动驾驶,可以兼顾技术的安全性和泛化性,做到安全性高于人类驾驶员10倍以上,实现城市级全域复杂场景覆盖。

百度自动驾驶技术部总经理徐宝强介绍,Apollo ADFM感知大模型已经实现包括检测、跟踪、理解、建图这几项基本能力。其中感知大模型中的基础模型通过点云和视觉多模态融合的方式,实现了相机和主动光不同类型传感器的优势互补,兼顾深度、准确性和信息丰富程度。
同时,在数据处理上,感知大模型也实现了更完善的数据自标注,将原始数据批量自动化转化为粗标数据以及精标数据,极大程度的解决了标注数据获取这一困扰感知效果提升的瓶颈问题。在此之下,感知大模型对超长尾场景的检测能力更为精准,比如不规则障碍物、各种位置关系的行人、非机动车或是施工占道等等。

决策规划部分,百度Apollo ADFM已经实现了合规避障、博弈、预判等基本能力,同时跳出了原有决策规划任务中预测、决策、车道选择等阶段性任务,可以通过全链路模型化综合输出多元环境信息,直接生成执行轨迹。另外,这套规划决策模型也将人类驾驶员的驾驶数据作为训练数据,从行为拟人到超越人类驾驶,提升系统的安全性。

Apollo自动驾驶大模型 (Apollo ADFM)还将应用于L2+,国内唯一的纯视觉城市NOA产品ANP3将升级为ASD(Apollo Self-Driving),首发极越全系车型,奔跑在更为广阔环境L2+将为L4反哺数据,进一步缩短验证时间。
在大模型的体系之下,已经形成ApolloL2和L4业务底层同源,是一个同源异构,再针对不同的业务形式,针对不同的硬件做相应的裁减,得到不同的产品效果。
陈卓介绍:
“现在随着整个大模型的成熟,整个自动驾驶技术的成熟, 在不同城市仍然会有一些新的场景、新的特征出现,但随着系统能力不断强化,技术日趋成熟,需要攻克的新工况、新场景正越来越少。我们现在速度越来越快,像刚才提到新城市的扩展,会在武汉的基础上再提升1倍”
在之后的开城计划中,需要运营城市在拥有在大批车辆的情况下,先建立换电站和当地运营团队,再后续铺开相关工作。百度也将重点放在了更有周边辐射能力的“城市群”概念,至于是“长三角”、“大湾区”等,还是要等待后续的部署。
陈卓表示,之所以选择武汉作为盈利的首城,除了武汉交通的复杂性和挑战性,还有武汉全域落地带来的体验、规模和需求优势。
依靠自动驾驶大模型的应用实践️,百度萝卜快跑已经攻克了武汉的复杂道路场景,实现了武汉城市全域、全时空场景覆盖,为近半数的武汉市民提供便捷的无人化出行服务。
2月27日,萝卜快跑全无人自动驾驶车辆驶过武汉杨泗港长江大桥和武汉白沙洲大桥,百度成为全国首家提供全无人跨江出行服务的企业。
在武汉,目前萝卜快跑的服务面积已超过3000平方公里,覆盖770万人口,日均行驶里程超10万公里。以5月5日一天的订单量为例,全天超300量的无人车累计接单超6600单,平均每车22单。
“武汉智能网联汽车产业+百度自动驾驶技术”已成为产城融合的成功案例,萝卜快跑正以武汉为核心,辐射带动华中区域的自动驾驶、智能网联产业发展。
“2023年初,我们运营规模还比较小,每辆车跑一天都要亏不少钱。到今年年初,随着时空覆盖和运营效率的大幅提升,萝卜快跑营收增长了9倍,亏损减少了一多半。随着千台第六代无人车陆续投入使用,萝卜快跑的营收增长速度会更快,已非常接近盈亏平衡的临界点。我们的目标是,到2024年底,萝卜快跑将在武汉实现收支平衡,并在2025年全面进入盈利期。萝卜快跑将成为全球首个实现商业化盈利的自动驾驶出行服务平台。”
03.
风景这边独好

截至4月,百度Apollo的自动驾驶里程已经超过1亿公里,从未发生过重大伤亡事故。同时,百度Apollo为每辆无人车及乘客购买了500万的保险,但过去两年的数据显示,实际车辆出险率仅为人类司机的1/14。
武汉作为全球无人驾驶规模最大的城市,成绩优异。
但如果视线拉远至全球范围,城市级的自动驾驶前景并没武汉看上去那么明亮。
远的不说,就从去年8月11号,加州政府宣布开放Robotaxi全天候运营往后算。
先来看看表现最差的Cruise。

开启全天候运营一周内,Cruise相继发生:
十多辆Cruise的Robotaxi因无线连接问题导致车辆意外停车,致使旧金山的一条街堵塞约20分钟;
一辆Cruise的Robotaxi在进入金门大道上的一个建筑工地后,驶入潮湿的混凝土,前侧车轮陷入其中;
旧金山一辆Cruise的Robotaxi与一辆消防车相撞。
2023年8月14日,一台Cruise Robotaxi的阻挡了载有大出血伤者的救护车离场,该名伤者最后在抢救20-30分钟后,不治离世。
这点燃了本就不满于自动驾驶车辆堵塞交通的群众的怒火。9月2日,有抗议者聚集在旧金山 Cruise 总部外打起抗议标语,标语上写着“No Mo Robos”和“Greed Kills”。
一波未平一波又起。
10月2日,有一人类司机将女子撞到了Cruise无人车的行驶路线上,当时Cruise的车辆确实检测到了有人被撞,稍微放慢了车速。女子当时倒地,全身只有腿部出现在了Cruise激光雷达检测范围中。虽然车辆左侧的摄像头能看到女子的小腿和脚,但车辆配备的算法无法分类和跟踪这两个部位。最终Cruise没有识别出女子位置,继续前进,然后左轮碾过女子。
而在接受该事件调查时,Cruise相关人士并未将事故全部视频交给加州DMV(机动车管理部),并以拙略的“网络故障”接口搪塞。
这让饱受指责的加州监管机构重拳出击,直接暂停了Cruise的无人驾驶许可。Cruise随后就坡下驴,停止了全美范围内的运营。
此事让本就陷入经营困境的Cruise情况进一步恶化,在高管团队相继辞职后,Cruise在12月14日表示将计划裁员900人,占员工总数的24%。
尽管Cruise在本周一(2024年5月13日)宣布,本周将在美国亚利桑那州开启配备人类安全驾驶员的 Robotaxi测试,但此举难以挽回其在用户和投资者心中的形象。
据外媒报道,Cruise第一季度亏损4.42亿美元,同比减少了21%。自2016年以来,通用汽车已向Cruise投资约80亿美元。Cruise的负责人曾一度承诺,到2025年将实现10亿美元的年营收,但目前该公司尚未赚到钱。

有这么个同行衬托,Waymo的日子会好过些吗?
也并没有。
美国国家公路交通安全管理局(NHTSA)在5月14日表示,该机构已对Alphabet旗下Waymo的自动驾驶汽车的性能展开调查,此前有报告称其自动驾驶出租车的驾驶行为可能违反了交通安全法。NHTSA表示,在接到包括17起碰撞事故在内的22起事故报告后,该机构对约444 辆Waymo汽车发起了初步评估。NHTSA称,在其中一些案例中,自动驾驶系统“似乎不服从交通安全控制装置”。
此前一天,Waymo一辆全自动无人驾驶出租车在洛杉矶地区的10号高速公路上载客行驶时发生车祸,一辆有人驾驶的汽车撞上了维莫的无人驾驶出租车,肇事车辆中的2人受伤。
3月下旬,Waymo技术主管查尔斯·齐 (Charles R.Qi)官宣,已加盟特斯拉FSD团队。
2月10日晚上9点左右,旧金山一辆停车等待的Waymo Robotaxi被人群打砸,随后被往车里扔了点燃的烟花,一辆由捷豹I-PACE改装而来的Robotaxi,成本大约在40万-50万美元(约287万-360万元),就这样付之一炬。
Cruise满身血泪、Waymo一地鸡毛。
哦,曾经还有Uber。

2018年3月18日,Uber自动驾驶车以大约63km/h的时速撞死了一位推自行车的路人,这是世界首例自动驾驶致死案。事发后Uber主动停掉了多地无人车路测,很快亚利桑那州交通局收到时任州长指示,无限期吊销Uber无人车路测资格。目前,其自动驾驶业务已被变卖,而收购其业务的Aurora在年初宣布裁员。

在Apollo Day现场, 百度集团副总裁、智能驾驶事业群组总裁王云鹏在总结萝卜快跑成绩时表示,“小刮小蹭在所难免,但没有出现过重大的人员伤亡事故”。
对比那几个国外的月亮来看,殊为不易啊。
04.
其他二三事
在对话过程中,百度Apollo还透露了一些相对细节但仍有价值的内容,智驾网经过精简,附在文末。
提问:如何看待与特斯拉的关系,是合作还是竞争对手?
Apollo:目前特斯拉robotaxi是否入华的最终信息还未确定,但 “我们对此特别期待,也非常欢迎。”
提问:是否与车企建立合资公司?
Apollo:后续在业务有持续造血能力时引入进一步考虑。
提问:是否设置分级化运营,推出专车或机场线?
Apollo:在考虑,希望引入合作伙伴共同探讨。
提问:现在萝卜快跑的流量入口有哪些,后续如何规划推广?
Apollo:现在萝卜快跑的流量入口有三个:APP、微信小程序、百度地图,后续不排斥接入更多入口。
写在最后:
在3月的百人会上,王云鹏曾公开呛声余承东,表示华为智驾确实遥遥领先,只比百度差一点点了,做成这样相当不容易。
4月21日,他官宣否认百度放弃智能驾驶L2业务,同时发布了纯视觉城市领航辅助驾驶产品ANP3 Pro、百度地图V20版本以及基于文心大模型打造的智舱大模型2.0等“驾舱图”产品矩阵。
5月15日,他隔空喊话特斯拉:“想要做到当前百度的全无人运营水平,还是需要挺长时间,少则3年、多则5载”
百度Apollo正在逐步实现此前七周年全员信中透露的目标:
完成自动驾驶基础模型构建、萝卜快跑毛利转正并跑通商业模式、智驾智舱产品实现用户体验和性价比领先、百度地图差异化竞争及市场份额跑赢大盘。
智驾网和诸多行业媒体曾在报道中对百度Apollo的声量表示遗憾,而如今看来,跑步向前的萝卜,正在与百度Apollo一起,逐渐找回自己应有的节奏。
