随着人工智能技术的飞速发展,机器学习训练已成为推动行业智能化转型的关键力量。这些大模型以其强大的语言理解和生成能力,在自然语言处理、图像识别、智能推荐等多个领域展现出极大的潜力。然而,机器学习的训练与部署对存储系统提出了前所未有的挑战。海量的训练数据、复杂的模型结构以及高频的数据读写需求,使得传统的非结构化存储方案难以胜任。
滴滴不断致力于提升用户体验,积极拥抱人工智能技术,在探索过程中,也遇到了数据存储与处理的瓶颈。传统的存储系统往往只支持单一协议,数据在不同协议间的转换不仅耗时费力,还极大地影响了机器学习模型的训练效率和部署速度。具体问题表现如下 :
机器学习等业务数据非常多,最少百PB级别存储量,主要小文件为主,基本上每个卷文件数达到几千万到百亿之间。
提供一定性价比。充分利用资源的同时有不错的性能,通常元数据延迟在10MS以下,带宽吞吐要求百GB以上。
机器学习等业务希望拥有对象存储的易用性,又能支持文件系统,同一份数据能支持多协议无损访问互通。业务通常会把需要训练的大模型、机器学习数据通过S3协议上传,通过机器学习的POSIX协议挂盘训练,过一段时间后自动删除,降低数据在多存储系统迁移成本、训练效率和数据管理成本。
支持云原生,同一块的机器学习数据盘,会被1万个容器根目录或子目录挂载读取。
多团队之间高效利用同一集群同一份数据且互不干扰。用户使用不同协议访问数据,不同权限管理数据保持数据不被影响干扰,最典型是A用户上传数据后,不希望B用户有权限删除。

为了满足业务需求,我们总结了新一代的非结构化存储系统,最少需要满足以下几个特性:
最少要支持百PB以上数据存储。
单卷或桶需要支持百亿级别的文件存储。
高性能低延迟的元数据存储服务,写控制2MS以内,读控制在10MS以内。
高并发高吞吐的存储底座,带宽吞吐要求百GB以上。
支持云原生,基于CSI插件可以快速地在Kubernetes上使用。
支持多租户,充分利用物理资源,同时支持相应的QoS能力来保证租户之间隔离。
多协议无损融合互通,实现Posix、S3、HDFS三种不同存储协议无损访问互通。
支持多云架构,充分利用公有云能力,能保证云上云下架构一致,应用与不同的场景,云下可以使用滴滴自研的存储引擎,云上可以使用AWS S3、阿里云OSS、腾讯云COS、谷歌云等。
方案探索探索已有存储我们对滴滴内部现有的非结构化存储来探索否满足以上特性?
GIFT对象存储系统:自研的对象存储,起源于滴滴基础平台,项目2016年9月开始建设,我们2017年4月开始接手,目前分成2.0和3.0版本, 2.0支持百亿级小文件系统,3.0兼容S3协议。这系统支持多租户、百PB以上数据存储、单桶最高支持百亿级文件数、高并发高吞吐存储底座、兼容S3协议。但是不支持POSIX协议、也不支持HDFSF协议、更不支持多协议融合,所以不满足需求。
Ceph存储系统:提供对象、块、文件等存储系统,但文件和对象是两个独立系统,数据迁移成本高,不满足需求。
HDFS开源项目:主要离线hadoop大数据生态场景,大文件存储为主,不满足需求。
GlusterFS开源项目:只POSIX协议的文件存储,性能满足需求,但不支持多租户、不支持HDFS协议、不兼容S3协议、不支持多存储语义、同时单卷容量也不满足需求。
探索多存储组合通过上面单一系统结论,发现滴滴内部的单个非结构化存储系统是不满足需求,所以我们是不是可以考虑多个系统组合支持来解决业务问题,我们的组合方案:GlusterFS文件系统 + GIFT对象存储方案 和 类S3FS + GIFT对象存储方案。
将大批量的机器学习数据存储到GIFT对象存储系统中,需要训练时,再将需要训练的数据集复制到GlusterFS文件系统中,由机器平台挂载训练。
随着训练集数据越来越多,需要复制数据集占用整体训练时间比例越来越长。
GlusterFS文件系统支持数据盘的容量也越来越不满足训练需求。
同时数据在GlusterFS和GIFT对象存储都需要各存储一份,也比较浪费空间。

我们思考,是不是可以直接用一套系统来实现,上面实现S3和POSIX协议,这样就解决掉空间浪费和数据复制效率等问题。所以,我们就开始探索GIFT对象存储基础上直接使用类S3FS的文件系统。但又带来另外2个新的问题,即:无法提供原子的 rename 和 随机写,具体如下:
基于GIFT对象存储实现的S3FS,可以把 GIFT的 bucket 挂载到系统中以 POSIX 方式访问,但无法提供原子的 rename。例如:在test桶中有“/a/a1/a2/1.txt…”等文件,需要rename根目录下的a/文件夹为x/。

同时对随机写的操作也非常重,需要对整个先文件下载下来,修改后在重新上传到对象存储中。
探索业界方案无论是使用已有单个存储系统,还是多个存储系统组合,都不能完美解决业务问题,所以我们开始探索业界的解决方案:Juicefs+RDS+Gift对象存储系统
JuiceFS 是个非常优秀的分布式文件系统,它兼容Posix、S3和HDFS协议,同时支持云原生。我们在社区版JuiceFS本的的基础上支持多租户、黑洞,超时、异步写等能力,满足了我们DBPROXY业务日志存储1PB左右存储需求。但应用于机器学习、大模型训练这类的场景还是有些问题,具体如下:
社区版JuiceFS使用RDS存储元服务,主从同步本身有延迟,所以我们使用主库写,备库读会读写不一致问题,如果直接切到主库读写压力又非常大。
所有的OP操作都会被转为KV,需要多次与RDS元服务交互,延迟相对比较高。
读写数据块的链路比较长。读一个数据块,需要经过GIFT多层才能到的BS存储引擎,同时GIFT本身也需要元服务,在加上JuiceFS元数据,就存在两份元信息。
所有流量都要经过GIFT的DGW服务,而DGW的带宽是非常有限,无法最大化的利用机器网带宽。

OrangeFS 新一代存储系统设计吸收探索方案的经验,同时研究并吸取了 Ceph、HDFS、CubeFS、JuiceFS、seaweedfs(Facebook haystack思想)等开源的设计思想,结合GIFT对象存储等原架构的设计思想和线上实践经验基础上演进。

GIFT是滴滴自研的对象存储系统,从2017年接手以来,自研的2.0发版至今已支撑滴滴千亿级别大小文件存储,单桶最高达百亿级。这个系统主要由协议层、配置中心,RDS元数据、数据存储引擎等子系统组成。

接入服务:提供S3和GIFT V2协议解析的入口服务。
RDS元数据服务:提供文件的元数据存储。
配置中心:提供租户信息、流量控制、桶信息等配置管理。
BS数据存储引擎:提供对象存储的数据分片存储。
Pixar图片处理服务:提供简单分布式图片处理服务。包括:压缩、水印、剪裁等能力。
1、是否复用配置中心
快速存储组件配置变更并自动执行,包括:QPS、流量、开关等。
统一桶命名和管理。
多租户管理,包括:密钥管理、配置信息管理。
快速扩容和管理元服务。
快速扩容和管理存储引擎。包括:禁写等能力。
一个集群管理多少个节点?如何做隔离域?快速扩容?
一个集群管理N个存储引擎分组,每个分组可以管理M台机器(可配置)。故障域为一个分组池,异常最大影响一个分组,可随时设只读,分组间数据可自动或半自动平衡。所以一个集群最终可管理N*M个节点。
一个集群可以管理N个元服务分组,一个元服务管理N个桶/卷。
无论是存储引擎还得元服务,扩容只需要配置中心插入一条记录,10秒以内生效。
元服务快速扩容:

存储引擎快速扩容:

我们可以复用GIFT的接入服务设计,提供S3协议,可以节省研发周期同时又能吸取过去经验,为新服务提供稳定的接入层,包括:QoS能力。
限制总带宽和桶级带宽。
快速隔离。
容量预估,项目分等级预留资源。
桶级QPS限流。

从GIFT技术架构中我们可以看到元服务主要是采用RDS分库分表模式,数据分片存储采用多组BS数据储引擎进行并发分流。我们通过上传下载来理解下分库分表和并发分流,上传流程具体如下:
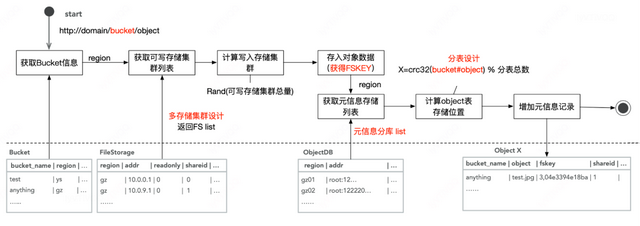

元信息分库表采用主从模式,如果全部从主库读写压力非常大,如果从从库读,那么就会有主从同步延迟问题,也就是刚写入的文件实时是读不到,产生不一致现象,所有这个就无法应用与新的架构中。
3、是否复用存储引擎BS存储引擎是一套自研的数据分片存储系统,主要是基于facebook haystack论文件实现的。主要包含两大系统,Master server和 block server。Master server主要负责节点管理;block server主要负责数据分片存储。具体架构如下 :

GIFT的BS存储引擎采用小文件合并,大文件分片设计。来解决小文件过多造成性能、存储空间浪费等问题。大于设定块大小的阈值时协议层需要对大文件进行切片,切到可支持的最大文件片,最后一片不限制。异步GC设计,主要是回收删除Needle时造成的空洞。

解决了多租户、配置中心、S3协议层实现、存储引擎一期等能力后,我们还需要解决哪些问题?
文件存储结构需要重新设计,能支持多个协议,包括:POSIX和HDFS协议。
元服务需要重新设计,支持最终能支持千亿级别大小文件存储。
支持云原生,基于CSI插件可以快速地在Kubernetes上使用。
存储引擎一期支持完数据分块存储后,还需要继续成本和性能优化。
1、文件存储结构我们结合行业相关方案和复用GIFT的大文件拆块思路,把一个文件拆成多个固定大小段,提高系统读写的并发性能,我们称之为Chunk。每个Chunk内部都会存在多次写入或修改的可能,我们把每次写入或修改不固定的大小块称之为Blob(Binary Large Object)。一个Blob是由多个固定长的数据块组成,我们称之为Block。具体如下图所示:

Chunk和Blob数据信息我们存储到自研的MDS元信息存储服务中,而Block分块,我们存储在自研的数据存储服务或公有云的S3、cos、oss等产品中。
A、写组织结构文件在写场景时,提高性能减少Blob数量,每个Chunk默认只生成一个Blob。
当业务写入或修改的内容对应的数据块与上一个Blob有重叠时,就会生成新的Blob,只要数据不重叠,那么就不生新的Blob。
当业务写入数据刚好介于block3 中间部分,那么这类场景也是生成新的Blob,来保证每次写入都是顺序写。
当业务写入的数据刚好是在Block5 数据块上,而且新写入的数据与Block 5原内容不重叠,那么可以做append操作。
数据块超过设定的值就直接提交到远程。元信息写满足后提交或超时后自动聚合的提交到远程。

文件在读的场景时,读取到某个Chunk时,会将所有了Blob进行合并,获取到一个新的Blob,在将新的Blob对应的数据块Block返回给上层调用服务。具体如下图所示:

我们在 OrangeFS 实现上封装相对路径的VFS层和绝对路径的PathFS层。VFS提供给Posix协议使用,封装了文件所有操作接口,包括:打开、创建、读、写、同步等操作。PathFS提供给 S3、HDFS 协议使用,主要是单文件多个操作集合,例如:上传文件,就是创建、写操作集合。具体如下图所示:

POSIX(Fuse):基于相对路径VFS层之上实现,Kernel缓存部分目录路径, POSIX Client自己缓存其余路径。
S3:基于绝对路径的PathFS层之上实现,是一个扁平KV结构。
HDFS:基于绝对路径的PathFS层之上实现,不经过内核层,所以没有缓存目录树,基于PathFS 构建Libofs动态库与SDK互通。
我们看下对路径VFS层和绝对路径的PathFS层区别,如下所示:

无论使用任何协议,我们解析完协议后,都会得到inode、offset、data三个信息。具体流程如下图所示:

读也是如此,无论使用任何协议,我们解析完协议后,都会得到inode、offset、data三个信息,具体操作如下图所示:

相比探索的组合方案,我们直接跳过GIFT中间所有层调用,直接把数据块写入存储引擎中,提高性能,降低链路调用的延迟,

MDS元服务存储服务主要提供元信息、配置信息存储服务。主要包含ROOT SERVER、Meta Server、PD等子系统。具体如下图所示:

Root Server:是个无状态服务,提供中心化的配置管理服务、快速存储组件扩容配置、变更自动执行,包括:QPS、BPS、开关、桶/卷的信息、多租户信息等管理。
Meta Server:元数据存储服务,提供元数据存储和目录树服务。
每个桶/卷 一组或多组 MS服务集群提供服务,每组 3+1 模式,保证快速恢复,减少毛刺。
本地引擎通过MULTI-RAFT、RocksDB进行数据一致性数据存储。
支持内存目录树和 inode cache提高S3或HDFS性能。
内存事务保证并发正确性。
PD Server:提供统一的Raft管控和调度服务,支持自动副本补齐、热点均衡、平滑升级等能力。
A、MDS元服务结构我们的MDS元服务结构,一个用户可以申请多个桶或卷,每个卷或桶是由一组RAFT或多组RAFT提供服务(子目录分区),如下图所示:

一期,不同桶或卷一组raft group支持,但只能Leader读写。
二期,我们支持桶或卷一组raft group支持,支持全部节点读写。
三期,我们支持桶或卷的子目录分区,也就是一个目录级别raft group的读写
B、降低MDS延迟我们客户端或S3或HDFS服务的操作只需要和MDS交互一次,所有的操作转换为本地KV操作,减少网络多次交互的开支。

OFS Posix是基于 fuse 的文件系统客户端,完全兼容Posix协议,具体如下图所示:

接收与处理 FUSE 的操作请求,与MDS Cluster 交互实现文件元信息的增删改查及管控操作, 与自建IDC的BS数据存储引擎或公有云OSS/S3/COS等系统交互实现文件分片数据的增删改查。
支持卷级的QoS,包括:带宽、QPS、黑洞等能力。
支持元信息缓存和数据缓存以提高性能。
支持秒级热升级能力,解决K8S紧急BUG或新功能无感上线问题。
6、数据冗余多副本系统在单AZ部署下,只要集群失效了,那么数据全部不可用。

多副本的3AZ部署模式最多可容忍2个AZ挂掉。

GIFT和OFS非结构化存储技术已覆盖全公司所有业务,其中OFS快速成长,已接入几十PB,包含机器学习、大数据、金融、国际化等业务。OFS具体架构如下图所示:

支持无损多协议融合,包括:POSIX、S3、HDFS等多存储语义。
支持多租户,集群支持千亿级文件存储,单桶/卷支持最高百亿级别文件存储。
自研MDS,支持 MultiRaft、内存事务、动态调度等技术。
支持OFS POSIX客户端秒级热升级技术
支持多公有云架构技术
支持全新的QOS能力,包括:黑洞,超时、异步写等特性。
支持回收站能力。
支持数据内容加密、压缩等能力。
踩坑之旅在机器学习训练的过程中,随着用户规模、数据量持续增长,不同阶段也踩了很多的坑。
第一阶段,初步接入机器学习训练,数据量PB级别,小文件很多,MDS元服务便成为瓶颈,主要从低延迟、正确性、扩展性、稳定性 4个方面来看看踩坑实践。
第二阶段,机器学习训练持续铺量,数据量数10PB级别,大小文件都有,文件系统客户端吞吐便成为瓶颈,主要从高吞吐、读写解耦、Client数量多3个方面来看看踩坑实践。
第三阶段,已经有一定规模,数据量近百PB级别,使用团队比较多,主要从权限隔离、收站两个方面来看看如何支持多团队高效协作。
4.1 MDS元服务1、低延迟研发测试完成,接了一些试点小流量,机器学习训练场景准备小规模放量,业务经常反馈训练抖动和读取慢,元数据整体延迟更是抖到秒级别,CPU内存、Meta延迟等电话报警不断,苦不堪言。训练也要求元数据延迟要小于10ms,所以我们通过Profile、性能压测、Micro Benchmark等一些工具进行了全链路性能分析和优化,发现问题比较多。
比如:Goroutine数10W太多,核心Goroutine得不到调度;Raft Propose仅仅入队列延迟高到100ms,Raft写入完成需要 300ms,Golang Runtime消耗整机CPU 45%等。
链路上:最开始Client一个OP会和MDS做多个RPC;优化为一个OP一次RPC,产生的读写KV都在本地执行,精简链路。
架构上:最开始GRPC收到请求之后,每个请求都占用一个Goroutine。10W 只读请求会有10W Goroutine 并发读KV;写请求并发Propose,串行Commit日志,串行Apply,Apply的时候执行OP,由于Apply串行执行OP,而且每个OP大小不一,有读有写,一个OP慢,那么整体Apply就慢,进而导致Raft Propose整体延迟升高。优化为队列+线程池模型,同时Raft Apply串行执行OP ---> Raft Apply 直接保存OP KV 结果,在Propose前并发执行OP。
网络上:GRPC换成TCP,队列+ Async Batch收发包,相同QPS情况下,CPU降低一半。
Raft上:在其串行本质的基础上通过Batch+Pipeline提升吞吐降低延迟。

延迟高问题解决之后,接踵而来的是数据读错,目录结构乱了。并发不一致、Read一次EIO、脏数据都会导致训练了几天的任务中断作废,需要重跑。
比如并发的 /a 目录下创建文件和删除 /a 目录,最开始的时候OP是串行执行的,不太用考虑并发问题,现在并发执行OP了,有可能出现在进去 /a 目录里面之后,创建文件的同时把目录删除了, 就可能会出现 在给用户反馈创建文件成功之后,用户看不到这个文件,成为孤儿节点。
有4种方案解决并发问题:
方案一:全串行,不可取延迟高
方案二:像CpehFS那样对文件目录等加读写锁,实现难度高,易出错。
方案三:像支持客户端分布式事务,但延迟高,难度大。
方案四:实现单机服务端乐观事务。我们最终支持单机服务端内存事务 + Write 串行。即对于冲突比较高的POSIX Write和S3 Put操作,同个文件通过Hash到同一个队列的方式串行执行。

内存事务分4步:
第一:并发内存执行,每个Txn OP操作都会涉及读写多个KV,执行Txn OP,内存得到一组待更新的KV buf。
第二:串行冲突检测,每个Txn在开始的时候有一个ReadTs,提交的时候有一个CommitTS,当前的Txn和其他正在提交的Txn进行读写Key的重叠判断。
第三:Raft落盘:等待Raft apply多副本复制结束。
第四:更新Cache:保证KV落盘的数据和更新Cache的顺序是一致的。
3、扩展性有了一点规模之后,大约几个PB的量,延迟高问题又出现了,线上训练有个Volume 30W qps 的Read,导致Leader机器CPU掉底,延迟飙升到秒级别。因为读写都在Leader,即使我们有2个Follower 和 1个Learner,也是一台机器在抗,一台有难,3台围观。
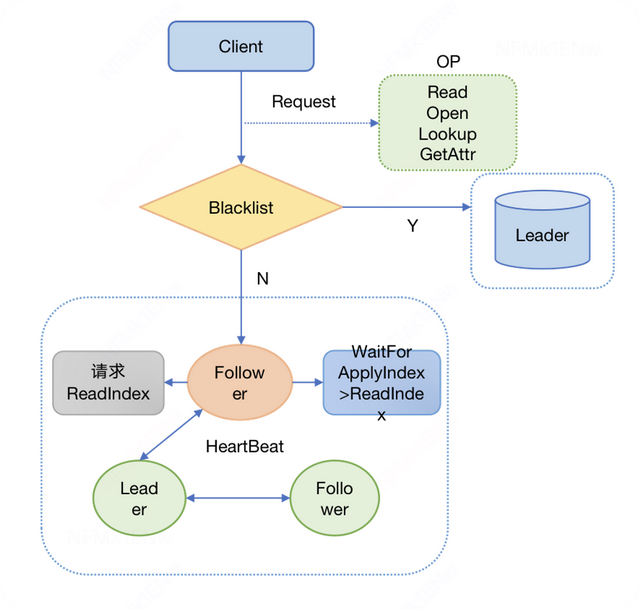
迫切的需要其他节点也提供读的能力,我们支持了OP粒度的Follower Read,可以通过扩充Learner来提供读能力。
实现上,Follower读的时候,会先从Leader拿取CommitIndex作为自己的ReadIndex,然后等待自己的ApplyIndex >= ReadIndex的时候,就可以提供线性一致性读。
服务端:
支持ReadIndex线性一致性读,以及Cache一致性。
支持Follower和Leader的LogIndexGap来动态开关Follower Read。
客户端:
管理多个节点的TCP连接池,有黑名单、重连等机制。
管控侧:
单节点和Volume粒度动态开关Follower Read。
运维侧:
1 Leader + 2 Follower + 1 Learner。
扩容Learner来提升读能力。
有天线上磁盘容量90%报警,部分Follower 写入失败,对线上倒是没有影响,排查发现,是因为Leader持续不断地给Follower 发送快照,导致Follower 磁盘爆满。
Leader给Follower恢复数据是先恢复存量快照,再恢复增量Log;当时单组Raft写入8k/s,Leader给Follower发快照的过程中,由于写入量大,Leader的Raft Log就做Compaction了,Leader发完快照准备发增量Log数据的时候,发现之前的增量Log数据已经被Compaction变成快照了,于是又会开始发送快照,循环往复,进而死循环,导致一直发快照。
同时也暴露了不少问题:
第一:最开始是KV粒度恢复数据的。改成了Ingest SStable的方式恢复数据。
第二:Log Compaction阈值配置很死板,不太好明确配置多少,跟写入量有关系。所以快照恢复期间暂停Log Compaction,同时带有超时,防止无限发快照。
第三:Follower恢复时触发Leader限流,因为Leader不感知Follower Recover状态,所以需要感知Follower状态,隔离限流影响,避免影响正常Propose。
第四:MultiRaft共用资源池,一个Volume有问题,影响到全局的Volume。所以支持了Busy和Slow队列,有问题的Volume放进Busy队列,延迟高的OP就放进Slow队列。

5、高效Meta
回过头来看,有两个高效的元数据设计也帮我们少踩了很多坑。
第一是高效Rename:
POSIX/HDFS的文件结构是一个目录树结构,以父目录ID+文件名相对路径作为Key。
S3是一个扁平KV结构,以绝对路径作为Key。
绝对路径缺点在于Rename开销大,但是S3路径解析高效。
相对路径Rename快,但是解析S3绝对路径的时候需要层层解析,所以我们支持了目录树缓存。整体采用相对路径。
第二是高效Readdir:
文件结构类元数据主要有Dentry和Attr,Dentry是目录结构信息,Attr是文件元信息。每个文件都有Dentry和Attr。文件系统硬链接只是文件名字不一样,即Dentry不一样,但是Attr是一样的。
Readdir大多数都需要把Dentry和Attr都列出来,没有硬链接的话,完全可以把Dentry和Attr合并成一张表存储,一次Scan KV就可以。那有硬链接的时候,如何高效兼顾硬链接以及Readdir呢?

方案一:一张表存储Dentry和Attr,存储多份,有几个硬链接就有几份。
方案二:Dentry和Attr分开,硬链接都在Dentry,共用的一个Attr在Attr表。结构比较清晰,但是Readdir的时候,需要一次 Scan Dentry + N次点查 Attr,性能差。
方案三:Dentry和Attr合并存储,Link表记录硬链接信息。Readdir 一次 Scan Dentry即可,缺点是实现比较复杂,查询硬链接需要两次,先查Link表再查Attr表。
线上使用硬链接的场景很少,所以采用方案三,达到即支持硬链接,又可以一次Scan 高效Readdir的目的。
4.2 POSIX客户端1、高吞吐OrangeFS POSIX挂盘训练提供元数据和数据的缓存能力,尽量Cache住所有的元数据和大部分数据,最大化吞吐,整体可以体统数十GB/s的带宽,高效的支持机器学习训练。

线上有用户反馈对同一个文件边写边读的时候,读写都会发生卡顿,影响正常使用。分析之后是因为目前读写使用同一把锁,而且读的时候会先把写到内存缓存Buf的数据主动Flush到远端存储,数据可见,才读取元数据,进而读取数据。也即读写会加锁等待刷数据,锁里面有IO流,自然就很卡顿。
所以需要像文件系统的PageCache那样,做到读写解耦,互不影响,所以我们支持了轻量级内存快照。

随着OrangeFS POSIX文件系统在线上的铺量,已经达到了数万个POSIX Client,对于版本管理也提出了新的要求,需要支持热升级,避免版本管理导致的业务IO中断。
线上运行态版本众多,收敛版本需求强烈。
客户端升级流程复杂,用户侧的影响大。
Client 数量巨大,急需解决 可维护性 的问题。
OrangeFS-POSIX热升级 流程步骤:
老进程 Exec拉起新进程,准备热升级。
老进程 向 新进程发送 fuse 设备fd。
老进程 停止接收/dec/fuse请求,并等待Inflight请求完成。
老进程 向 新进程 发送 上下文。
老进程 Flush缓存数据后退出。
完成热升级,新进程接管所有请求。

机器学习训练通常是多个团队共享同一个Volume,生产团队生产数据,消费团队训练,以及数据是有时效性的,过期之后就没用可以删除了。
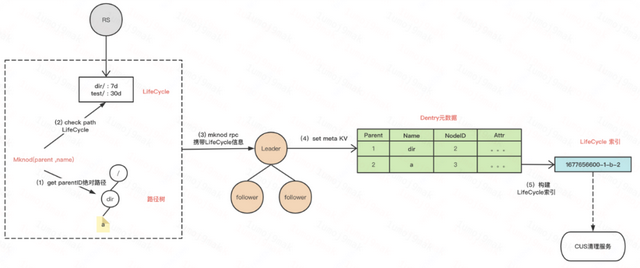
我们支持子目录TTL能力,自动删除过期文件,在界面配置即可。实现方式有两种:一种是定期扫描,一种是建立索引。考虑到定期扫描元数据开销大,所以我们在创建文件的时候同时根据创建时间戳构建KV索引,CUS清理服务后台扫描时间戳索引清理过期文件,提高稳定性且体验好。
OFS支持S3 Lifecycle规则并且做了拓展,整体基于Lifecycle来管理子目录需求。
TTL文件过期删除:支持子目录级别的过期数据删除。比如机器学习训练在界面上 配置 /user/didi/ 30天之后自动删除数据。
Readonly:支持Bucket/Volume粒度的只读,以及子目录粒度只读。比如训练通过S3接口在某个子目录生产完数据之后,设置只读。
权限管理:S3 AK/SK 认证、POSIX、Mknod、Read、Write OP粒度管控。
那么误删除的数据可以恢复吗?其实是可以的,删除的文件会被放到回收站。OFS有隐藏的系统目录,Trash目录就是存放用户删除的文件,expire目录存放TTL过期的文件,提供回收站的能力,这些都是元数据操作,不涉及数据操作,回收站默认保留7天,过期之后,CUS并发的删除数据和元数据。

回收站怎么做呢?回收站的文件目录结构分两种:一种是扁平KV结构,一种是目录树结构。考虑到实现的复杂度,我们支持扁平KV结构,会带来三个问题:
第一:会丢失原始目录信息,所以垃圾文件名通过记录父节点ID + 自己文件名可以恢复到原始路径。
第二:无法区分同目录下同名垃圾文件,所以垃圾文件名还需要记录自身Inode号。
第三:清理垃圾文件的同时恢复该文件,导致数据不完整。清理文件是非原子操作(先删数据再删元数据),但恢复只操作元数据,可能导致被恢复的垃圾文件 数据被CUS清理删除了。所以需要加上invalid标识,清理时标记不可恢复。
所以最终回收站文件名字包含 invalid-parentID-name-nodeID四部分组成。

恢复好用吗?其实是不好用的,最开始需要遍历回收站,帮用户一个文件一个文件的恢复,费时费力,非常痛苦;之后支持了子目录录递归恢复、可以恢复根目录下某个时间点之前的所有文件,已帮助用户恢复数百万个文件,真正的帮助到多个团队协作。
